

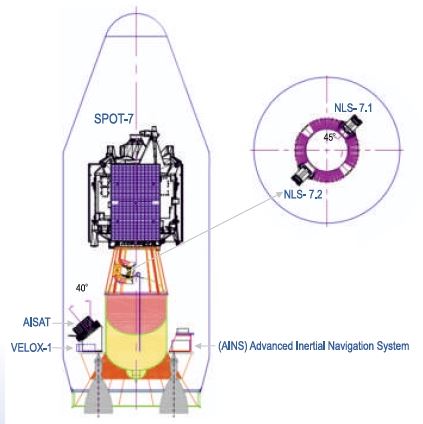
A Índia levou a cabo o seu terceiro lançamento orbital de 2014 ao colocar em órbita um satélite de detecção remota francês, o SPOT-7. O lançamento do foguetão PSLV-C23 (PSLV-CA) teve lugar às 0422UTC do dia 30 de Junho de 2014 a partir da Plataforma de Lançamento FLP do Centro Espacial Satish Dawan SHAR, localizado na Ilha de Sriharikota.
Para além do satélite SPOT-7 seguiam a bordo os satélites AISAT, NLS-7.1 (CanX-4),NLS-7.2 (CanX-5) e o VELOX-1.
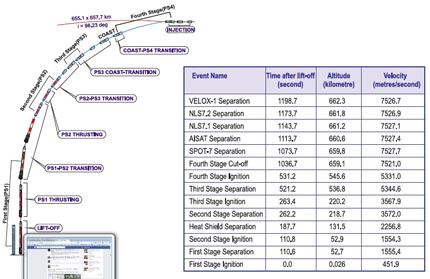
Todas as fases do lançamento decorreram sem problemas e os satélites separaram-se sem incidentes nas órbitas previstas.
Com uma massa de 714 kg, o satélite SPOT-7 é o mais recente veículo da série de satélites de detecção remota franceses Satellite Pour l’Observation de la Terre. O satélite foi construído pela Airbus Defence & Space e é baseado na plataforma AstroSat-500, estando equipado com dois paneis solares capazes de gerar 1.450 watts de energia.
 O SPOT-7 transporta dois novos instrumentos de observação que constituem o New AstroSat Optical Modular Instruments, capazes de obter imagens pancromáticas com resoluções de 1,5 a 2,2 metros e imagens multi-espectrais com resoluções de 6,0 a 8,8 metros.
O SPOT-7 transporta dois novos instrumentos de observação que constituem o New AstroSat Optical Modular Instruments, capazes de obter imagens pancromáticas com resoluções de 1,5 a 2,2 metros e imagens multi-espectrais com resoluções de 6,0 a 8,8 metros.
O satélite AISat-1 (imagem em baixo) foi desenvolvido pela agência espacial alemã DLR e tem uma massa de 14 kg. O satélite está equipado com uma antena helicoidal de 4 metros de comprimento que será utilizada para captar sinais identificativos e sinais de busca e reconhecimento proveniente de embarcações nos mares, retransmitindo posteriormente esses sinais para as estações terrestres no solo. Esta missão servirá também para proporcionar o ensaio em órbita do modelo de satélite Clavis que foi desenvolvido pela DLR, além de levar a cabo outras experiências tecnológicas.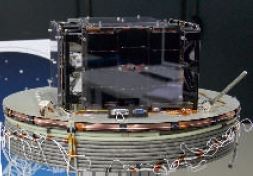
Os dois satélites CanX pertencem ao programa canadiano Advanced Nanospace Experiment desenvolvido pela Universidade de Toronto. Os dois veículos têm um desenho idêntico e uma massa de 7 kg, sendo baseados na plataforma Generic Nanosatellite Bus. Tendo uma forma cúbica com uma aresta de 0,20 metros, os satélites estão equipados com painéis solares colocados nas suas superfícies e que serão utilizados pata gerar energia para os instrumentos a bordo. Os dois satélites transportam também baterias recarregáveis para o armazenamento de energia.
 Os dois satélites têm como objectivo a demonstração tecnológica e ambos estão equipados com o Canadian Nanosatellite Advanced Propulsion System (CNAPS), um sistema de estabilização nos três eixos espaciais que permitirá a manobrabilidade em formação em órbita. Os satélites irão também testar o Formation-Flying Onboard Nanosatellite Algorithm (FIONA), um software que se espera poder permitir aos satélites manter a formação após a sua separação. A bordo encontram-se também receptores de GPS que serão utilizados para calcular as posições e velocidades dos satélites.
Os dois satélites têm como objectivo a demonstração tecnológica e ambos estão equipados com o Canadian Nanosatellite Advanced Propulsion System (CNAPS), um sistema de estabilização nos três eixos espaciais que permitirá a manobrabilidade em formação em órbita. Os satélites irão também testar o Formation-Flying Onboard Nanosatellite Algorithm (FIONA), um software que se espera poder permitir aos satélites manter a formação após a sua separação. A bordo encontram-se também receptores de GPS que serão utilizados para calcular as posições e velocidades dos satélites.
A missão VELOX-1 da Singapura é na realidade constituída por dois pequenos satélites. O satélite mais pequeno, PSAT, será libertado a partir do satélite maior, NSAT, que é um Cubesat-3U. Com uma missão de dois anos, o NSAT tem uma massa de 4,5 kg e o seu principal instrumento é uma câmara para a observação da superfície terrestre. Por seu lado, o PSAT tem uma massa de 0,25 kg e irá testar as comunicações intersatélite após a sua separação do NSAT. O PSAT tem as dimensões 0,03 x 0,06 x 0,07 metros e um tempo de vida útil de 1 ano.
O foguetão PSLV
 O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
O PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
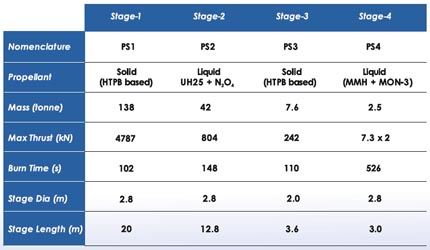 O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.

O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
 A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios: 1º Estágio: sistema SITVC (Secondary Injection Thrust Vector Control) para controlo de translação, e motores de reacção para controlo da rotação; 2º Estágio: movimentação do motor para controlo de translação e motor de controlo da rotação; 3º Estágio: escape (tubeira) flexível para controlo de translação e sistema de controlo de reacção PS-4 para controlo da rotação; 4º Estágio: movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.


Os próximos lançamentos com o foguetão PSLV são (todas as horas UTC):
?? (????:??UTC) – C26 – FLP – IRNSS-1C
?? (????:??UTC) – C27 – FLP – IRNSS-1D
?? (????:??UTC) – C28 – FLP – IRNSS-1E
Dados estatísticos
– Lançamento orbital: 5369
– Lançamento orbital com sucesso: 5021
– Lançamento orbital Índia: 43
– Lançamento orbital Índia com sucesso: 36
– Lançamento orbital desde Satish Dawan: 43
– Lançamento orbital desde Satish Dawan com sucesso: 36
A seguinte tabela mostra os totais de lançamentos executados este ano em relação aos previstos para cada polígono à data deste lançamento: 1ª coluna – lançamentos efectuados (lançamentos fracassados); 2ª coluna – lançamentos previstos à data; 3ª coluna – satélites lançados:
Baikonur – 9 (1) / 29 / 11
Plesetsk – 4 / 12 / 6
Dombarovskiy – 1 / 4 / 37
Cabo Canaveral AFS – 7 / 22 / 12
Wallops Island MARS – 1 / 3 / 34
Vandenberg AFB – 1 / 6 / 1
Kauai TF – 0 / 1 / 0
Jiuquan – 1 / 2* / 1
Xichang – 0 / 6* / 0
Taiyuan – 0 / 3* / 0
Tanegashima – 2 / 5 / 13
Kourou – 4 / 14 / 8
Satish Dawan, SHAR – 3 / 5 / 7
Odyssey – 1 / 1 / 1
Palmachim – 1 / 1 / 1
* Valores não precisos
Dos lançamentos bem sucedidos levados a cabo: 38,2% foram realizados pela Rússia; 26,5% pelos Estados Unidos (incluindo ULA, SpaceX e Orbital SC); 2,9% pela China; 11,8% pela Arianespace; 5,9% pelo Japão, 8,8 % pela Índia, 2,9% por Israel e 2,9% pela Sea Launch.
Os próximos lançamentos orbitais previstos são (hora UTC):
01 Jul (0956:00) – Delta-II 7320-10C – Vandenberg AFB, SLC-2W – OCO-2
03 Jul (????:??) – 14A05 Rokot/Briz-KM (4929794555/72522) – GIK-1 Plesetsk, LC133/3 – Gonets-M n.º 18; Gonets-M n.º 19; Gonets-M n.º 20
08 Jul (1458:28) – 14A14-1B Soyuz-2-1B/Fregat (Л15000-011/1025) – Baikonur, LC31 PU-6 – Meteor-M n.º 2 (Метеор-М №2); MKA-PN2 (Relek) (МКА-ПН2 (Рэлек)); Ukube-1; SkySat-2; TechDemoSat-1 (TDS-1); AISsat-2
10 Jul (1855:20) – Soyuz-STB/Fregat-MT (005/1032/VS08) – CSG Kourou (Sinnamary), ZLS – O3b FM03; O3b FM06; O3b FM07; O3b FM08
10 Jul (1802:51) – Antares-120 – MARS Wallops Island, LP-0A – Cygnus Orb-2 (CRS2)