

A Corporação Espacial Estatal Russa, Roscosmos, levou a cabo o lançamento da cápsula espacial Soyuz MS-14 (Союз МC-14) às 0338:31,987UTC do dia 22 de Agosto de 2019. A cápsula foi lançada sem qualquer tripulação a bordo, mas na cabine encontrava-se o robot antropomórfico Skybot F-850.
O lançamento da Soyuz MS-14 (11F732A48 n.º 743) foi levado a cabo pelo foguetão 371KK35 Soyuz-2.1a (Ya15000-037), a partir da Plataforma de Lançamento PU-6 do Complexo de Lançamento LC31 (17P32-6) do Cosmódromo de Baikonur, Cazaquistão.
Com uma massa de 7.220 kg, a Soyuz MS-14 foi colocada numa órbita inicial com um perigeu a 198.1 km, apogeu a 267,1 km e inclinação orbital de 51,65° e período orbital de 88,85 minutos. As manobras de aproximação e acoplagem com a ISS têm uma duração de cerca de seis horas, com a acoplagem com módulo Zvezda a ter lugar às 1050UTC do dia 20 de Julho.
Esta é uma pouco usual missão não tripulada de um veículo de transporte tripulado Soyuz, actuando como um veículo de teste para realizar a verificação e validação em voo de novos sistemas de navegação e controle de movimento, um sistema de controle de descida renovado e uma nova interface de software do sistema de abortagem com o foguetão lançador.
Desde o início que o foguetão Soyuz-2.1a foi projectado para ser um veículo de lançamento tripulado. Porém, os atrasos na sua introdução levaram à criação do foguetão Soyuz-FG para colmatar o fosso entre o foguetão 11A511U Soyuz-U e o 371KK35 Soyuz-2.1a.
 Com o lançador Soyuz-2.1a agora em operação e pronto para assumir as tarefas de lançador tripulado, a Roscosmos realiza esta missão não tripulada para verificar se o sistema de emergência da Soyuz MS não será accionado quando o foguetão Soyuz-2.1a manobrar para o azimute apropriado após o lançamento.
Com o lançador Soyuz-2.1a agora em operação e pronto para assumir as tarefas de lançador tripulado, a Roscosmos realiza esta missão não tripulada para verificar se o sistema de emergência da Soyuz MS não será accionado quando o foguetão Soyuz-2.1a manobrar para o azimute apropriado após o lançamento.
Os foguetes 11A511U Soyuz-U e 11A511U-FG Soyuz-FG usavam sistemas de controle de voo analógicos. Estes sistemas foram incapazes de rolar o lançador para a trajectória correcta após o lançamento. Assim, estes veículos eram literalmente apontados na plataforma de lançamento para o seu azimute de voo correcto, de modo que tudo o que o foguetão tinha que fazer depois da descolagem era simplesmente inclinar-se para a trajectória adequada.
Como tal, o sistema de abortamento de lançamento da nave Soyuz MS foi projectado para que, se detectasse uma alteração na orientação do foguetão, accionasse o sistema de abortagem para resgatar a cápsula tripulada. Mas o Soyuz-2.1a usa sistemas digitais de controle de voo e executa uma rotação para se alinhar ao azimute de lançamento correto após abandonar a plataforma, criando assim uma desconexão entre o lançador Soyuz-2.1a e as cápsulas Soyuz MS.
Para resolver a situação, a Roscosmos desenvolveu um patch de software que foi testado durante esta missão. Essencialmente, este patch diz aos computadores de voo da Soyuz MS-14 que uma rotação após abandonar a plataforma de lançamento está “Ok” e a cápsula não acciona o programa de emergência quando o programa de rotação começa.
Além do teste anterior, esta missão também realizará testes em voo de um novo sistema de navegação e um sistema de controle de descida renovado. Estes novos sistemas serão padrão no próximo veículo de carga Soyuz GVK que será lançada em 2022.
O robot Skybot F-850
Anteriormente designado FEDOR (Final Experimental Demonstration Object Research), o Skybot F-850 é um robot humanóide russo – completo com braços e pernas – construído para replicar os movimentos de um operador remoto, podendo também realizar algumas acções de forma autónoma. O robot irá fornecer informações sobre as forças G e temperatura no interior da Soyuz MS-14 durante o lançamento e as diferentes fases de aproximação e acoplagem à ISS.


No interior da estação espacial irá realizar vários testes de movimentos – tanto de forma comandada como de forma autónoma – durante a sua permanência de duas semanas.
Além dos testes de movimento, o Skybot também testará o seu programa de voz e a capacidade de se comunicar com a tripulação russa da estação. Irá também ajudar a tripulação em determinadas tarefas para avaliar a capacidade do robot de funcionar em microgravidade.
O veículo Soyuz MS (11F732A48)
Externamente não existem diferenças significativas entre a Soyuz MS (Союз МС) e a Soyuz TMA-M (Союз TMA-M). As melhorias introduzidas na Soyuz MS centram-se principalmente ao nível dos sistemas de comunicações e de navegação com a introdução de modernos dispositivos electrónicos.
Se a Soyuz TMA-M surgiu como uma versão melhorada da Soyuz TMA, o mesmo acontece com a Soyuz MS em relação à versão anterior. As modificações introduzidas na Soyuz TMA-M tiveram como função substituir os dispositivos de orientação, navegação e sistemas de controlo de bordo, além do sistema de medição, por dispositivos desenvolvidos tendo como base novas tecnologias electrónicas e digitais, e um novo software; prolongar as capacidades funcionais do veículo tendo em conta o controlo dos sistemas de bordo a partir dos computadores de bordo e proporcionar uma integração mais profunda com os computadores da ISS quando na utilização de um canal de transmissão multiplex; e aumentar as capacidades de carga através de uma redução de massa dos sistemas de bordo. Assim, cinco novos dispositivos com uma massa total de cerca de 42 kg (em vez de seis dispositivos com uma massa total de cerca de 101 kg) foram instalados no sistema de controlo, orientação e navegação. Neste caso, o consumo de energia foi reduzido até 105 W (em vez de 402W).
A Soyuz MS introduz um novo sistema de navegação Kurs, um novo sistema de comunicação via rádio, a utilização do sistema GPS/GLONASS para navegação, e a utilização de um sistema de comunicações de proximidade para navegação relativa.
A introdução destas alterações altera somente o aspecto externo no que diz respeito ao número de antenas no veículo.

Na Soyuz MS é utilizado um computador central introduzido na versão TMA-M (TsVM-101 – com uma massa de 8,3 kg em vez do velho Árgon-16 com uma massa de 70 kg) com novo dispositivo de interface com uma massa total de cerca de 26 kg e um consumo energético de 80 W como parte das modificações ao sistema de controlo, orientação e navegação. A capacidade do computador central é de 8 M operações por segundo, a capacidade da memória RAM é de 2.000 kB. A capacidade operacional é consideravelmente aumentada. O sistema de telemetria analógico utilizado anteriormente foi também substituído por um novo sistema de telemetria designado MBITS.
A Soyuz MS pode permanecer durante 215 dias acoplada à estação espacial internacional. Esta permanência é limitada devido à natureza corrosiva dos propelentes utilizados nas manobras orbitais que levam à degradação dos tanques e dos sistemas de propelente com o passar do tempo.
As modificações e melhorias levadas a cabo entre a Soyuz TMA-M e a Soyuz MS tiram partido da comunalidade entre os veículos Soyuz e os veículos de carga Progress, pois é nestes veículos que são primeiramente ensaiadas as modificações antes de serem introduzidas nos veículos tripulados.

As principais alterações na Soyuz MS dão-se na substituição do sistema de comunicações por rádio Kvant-V, de fabrico ucraniano, por um Sistema Unificado de Comando e Telemetria, terminando com a dependência da Rússia no que diz respeito ao fabrico de antenas, alimentadores e sistemas electrónicos que provinham da Ucrânia. O novo sistema de comando e telemetria é capaz de utilizar o sistema de comunicações geostacionário Luch para o envio de telemetria para o solo e para a recepção de comandos na parte orbital durante a qual não se encontra sobre território russo. Assim, com este novo sistema de comunicações a Soyuz MS é capaz de se manter em contacto com o centro de controlo durante 70% da sua órbita, ao contrário dos 10 a 20 minutos do que era capaz anteriormente.
Outra grande melhoria na Soyuz MS é a implementação da Ligação de Comunicações de Proximidade com a estação espacial durante as manobras de aproximação para garantir uma navegação relativa como uma fonte adicional de dados. A Soyuz MS está equipada com receptores GPS e GLONASS para determinação precisa do tempo, calculo do vector de estado e determinação orbital, permitindo assim uma maior precisão das manobras orbitais (queimas), mesmo pelo próprio veículo de forma automática, não necessitando do seguimento por radar que somente é possível quando o veículo passava sobre as estações terrestres.
A Soyuz MS também alberga um novo sistema de câmaras e utiliza a transmissão digital de vídeo para assim enviar imagens de melhor qualidade para a estação espacial e para o solo no processo de seguimento das manobras de aproximação e acoplagem. Em vez do sistema analógico Klyost, o veículo utiliza um sistema de televisão que permite que o vídeo seja transmitido como parte do fluxo de dados através da ligação de comunicações espaciais.
O novo sistema de navegação Kurs é uma melhoria significativa da nova geração em relação à anterior geração, deixando o sistema Kurs-A e introduzindo o sistema Kurs-NA. O sistema Kurs utilizado nos veículos Soyuz e Progress, é um sistema de rádio que permitem a realização automática das manobras de aproximação e acoplagem com a estação espacial. O sistema utiliza a emissão de sinais enviados pelo veículo alvo que podem ser recebidos por várias antenas no veículo perseguidor para determinar a distância e os ângulos para iniciar o encontro a uma distância de 200 km. O sistema Kurs-NA elimina todos os componentes de fabrico ucraniano e permite uma significativa redução de peso ao mesmo tempo que aumenta as capacidades do sistema. O novo sistema necessita somente de uma antena e fornece medições mais precisas durante as manobras de aproximação e acoplagem.
A Soyuz MS está também equipada com uma nova unidade de controlo Burk que substitui o anterior sistema que já não se encontra em produção. São também utilizadas novas unidades BDUS-3A para o sistema de controlo de atitude da Soyuz MS e um novo sistema de iluminação com luzes LED para a aproximação final à ISS.
O sistema de fornecimento de energia é mais eficiente do que o seu predecessor utilizando células solares de elevada eficiência e os propulsores de manobra no exterior no veículo encontram-se em novas posições, tornando o sistema mais robusto.
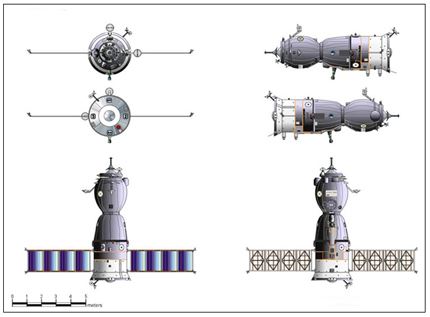
A Soyuz MS pode transportar até três tripulantes tendo uma vida útil em órbita de 200 dias, podendo no entanto permanecer 14 dias em voo autónomo. Tendo um peso de total de 7.080 kg (podendo transportar 900 kg de combustível), o seu comprimento total é de 6,98 metros, o seu diâmetro máximo é de 2,72 metros e o seu volume habitável total é de 9,0 m3. Pode transportar um máximo de 170 kg de carga no lançamento e 50 kg no regresso à Terra. A velocidade máxima que pode atingir no regresso à Terra com a utilização do pára-quedas principal é de 2,6 m/s, sendo a sua velocidade normal de 1,4 m/s, porém com o pára-quedas de reserva a sua velocidade máxima é de 4,0 m/s e a velocidade normal será de 2,4 m/s . Tal como o seu antecessor, o veículo Soyuz MS é composto por três módulos: o Módulo Orbital, o Módulo de Reentrada e o Módulo de Propulsão e Serviço.
O Módulo Orbital (Botivoi Otsek) – Tem um peso de 1.278 kg, um comprimento de 3,29 metros, diâmetro de 2,2 metros e um volume habitável de 6,6 m3. Está equipado com um sistema de acoplagem dotado de uma sonda retráctil com um comprimento de 0,5 metros, e um túnel de transferência. O comprimento do colar de acoplagem é de 0,22 metros e o seu diâmetro é de 1,35 metros. O sistema de acoplagem Kurs está equipado com duas antenas, estando uma colocada numa antena perpendicular ao eixo longitudinal do veículo. Este módulo separa-se do módulo de descida antes do accionamento dos retro-foguetões que iniciam o regresso à Terra.
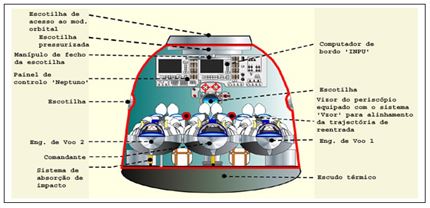
 O Módulo de Reentrada (Spuskaemiy Apparat) – Podendo transportar até 3 tripulantes, tem um peso de 2.835 kg, um comprimento de 2,14 metros, um diâmetro de 2,20 metros e um volume habitável de 3,85 m3. Possui 6 motores de controlo com uma força de 10 kgf que utilizam N2O4 e UDMH como propolentes. O Módulo de Descida permite aos seus tripulantes o uso dos seus fatos espaciais pressurizados durante as fases de lançamento e reentrada atmosférica, estando também equipado com o sistema de controlo do veículo, pára-quedas, janelas, sistema de comunicações e com os assentos Kazbek-UM. A aterragem é suavidade utilizando um conjunto de foguetões que diminui a velocidade de descida alguns segundos antes do impacto no solo. Durante o lançamento, acoplagem, separação, reentrada atmosférica e aterragem, o Comandante está sentado no assento central do módulo com os restantes dois tripulantes sentados a cada lado.
O Módulo de Reentrada (Spuskaemiy Apparat) – Podendo transportar até 3 tripulantes, tem um peso de 2.835 kg, um comprimento de 2,14 metros, um diâmetro de 2,20 metros e um volume habitável de 3,85 m3. Possui 6 motores de controlo com uma força de 10 kgf que utilizam N2O4 e UDMH como propolentes. O Módulo de Descida permite aos seus tripulantes o uso dos seus fatos espaciais pressurizados durante as fases de lançamento e reentrada atmosférica, estando também equipado com o sistema de controlo do veículo, pára-quedas, janelas, sistema de comunicações e com os assentos Kazbek-UM. A aterragem é suavidade utilizando um conjunto de foguetões que diminui a velocidade de descida alguns segundos antes do impacto no solo. Durante o lançamento, acoplagem, separação, reentrada atmosférica e aterragem, o Comandante está sentado no assento central do módulo com os restantes dois tripulantes sentados a cada lado.
O Módulo de Propulsão e Serviço (Priborno-agregatniy Otsek) – Tem um peso de 3.057 kg, um diâmetro base de 2,2 metros e um diâmetro máximo de 2,7 metros. Está equipado com 16 motores de manobra orbital com uma força de 10 kgf cada, e 8 motores de ajustamento orbital também com uma força de 10 kgf. Todos os motores utilizam N2O4 e UDMH como propelentes. O sistema de manobra orbital possui um impulso específico de 305 s. O seu sistema eléctrico gera 0,60 kW através de dois painéis solares com uma área de 10,70 m2.

O foguetão 371KK35 Soyuz-2.1a
 O foguetão 14A14 Soyuz-2 representa a mais recente evolução do épico míssil balístico intercontinental R-7 desenvolvido por Sergei Korolev nos anos 50 do século passado. O novo lançador apresenta motores melhorados, modernos sistemas aviónicos digitais e uma reduzida participação de componentes de fabrico não russo.
O foguetão 14A14 Soyuz-2 representa a mais recente evolução do épico míssil balístico intercontinental R-7 desenvolvido por Sergei Korolev nos anos 50 do século passado. O novo lançador apresenta motores melhorados, modernos sistemas aviónicos digitais e uma reduzida participação de componentes de fabrico não russo.
O lançador é também conhecido pela designação Soyuz-ST (quando lançado desde o CSG Kourou) e foi especialmente desenhado para uma utilização comercial aumentando a sua performance geral apesar de o desenho básico do veículo permanecer o mesmo. A versão Soyuz-2.1a foi desenhada para missões tripuladas, substituindo o lançador 11A511U-FG Soyuz-FG.
As alterações foram realizadas ao nível de uma melhoria da performance dos motores do primeiro e do segundo estágio com novos injectores e alteração da mistura dos propolentes; aumento na performance do terceiro estágio; introdução de um novo sistema de controlo permitindo uma alteração do plano orbital já durante o voo ; introdução de um novo sistema de telemetria digital para a monitorização do lançador e a introdução de uma nova ogiva de protecção de carga com um diâmetro de 3,6 metros.
O foguetão 14A14 Soyuz-2 pode ser equipado com um quarto estágio, nomeadamente o estágio Fregat, utilizando as carenagens de protecção do tipo ST e SF.
Este lançador é capaz de colocar uma carga de 7.800 kg numa órbita terrestre a 240 km de altitude com uma inclinação de 51,80º. No lançamento desenvolve uma força de 4.144.700 kN. A sua massa total é de 310.000 kg, o seu diâmetro no estágio principal é de 2,95 metros e o seu comprimento total é de 43,40 metros.
O primeiro estágio do 14A14 Soyuz-2 é composto pelos quatro propulsores laterais (Blok B, V, G e D) com uma massa bruta de 44.400 kg, tendo uma massa de 3.810 kg sem combustível. Cada propulsor tem um motor RD-107A (14D22) que desenvolve uma força de 1.021.097 kN (vácuo), com um Ies 310 s e um Tq de 120 s. Têm um comprimento de 19,60 metros, um diâmetro de 2,69 metros e consomem LOX e querosene.
O segundo estágio (Blok-A) tem um comprimento de 27,80 metros, um diâmetro de 2,95 metros, um peso bruto de 105400 kg e um peso sem combustível de 6.975 kg. Está equipado com um motor RD-108A que no lançamento desenvolve 999.601 kgf (vácuo), com um Ies de 311 s e um Tq de 286 s. Consome LOX e querosene.
O terceiro estágio (Blok-I) tem um comprimento de 6,74 metros, um diâmetro de 2,66 metros, um peso bruto de 25.200 kg e um peso sem combustível de 2.355 kg. Está equipado com um motor RD-0110 que no lançamento desenvolve 294.000 kgf (vácuo), com um Ies de 359 s e um Tq de 300 s. Consome LOX e querosene.
As modificações introduzidas no novo lançador foram sendo testadas em duas versões do mesmo veículo o 14A14-1A Soyuz-2-1.a e o 14A14-1B Soyuz-2-1.b. Este último veículo é um lançador a três estágios no qual o motor RD-0124 é já empregado no último estágio.
Com dimensões semelhantes ao motor RD-0110 utilizado nas versões anteriores dos lançadores Soyuz, o motor RD-0124 apresenta como principal diferença a introdução de um sistema de ciclo fechado no qual o gás do oxidante que é utilizado para propulsionar as bombas do motor é então direccionado para a câmara de combustão onde é queimado com restante propolente em vez de ser descartado. Esta melhoria no motor aumenta a performance do sistema e, como consequência, aumenta a capacidade de carga do lançador em 950 kg. Um propolente especial de ignição é utilizado para activar a combustão do motor e são utilizados dispositivos pirotécnicos para controlar o funcionamento do motor. Cada uma das quatro câmaras de combustão pode ser movimentada ao longo de eixos para manobrar o veículo.
Em 1996 tiveram início os testes do motor RD-0124 e foram finalizados em Fevereiro de 2004 nas instalações da Khimavtomatika em Voronezh. Nesta altura previa-se que a produção em série do novo motor teria início em 2005. A 27 de Dezembro de 2005 teve lugar outro teste do motor, abrindo caminho para os ensaios em grupo de todo o terceiro estágio do lançador 14A14-B Soyuz-2-1B nas instalações da NIIKhimMash em Sergiev Posad.
No início de 2005 a Arianespace anunciava que a primeira missão de teste do foguetão 14A14-1B Soyuz-2-1B teria lugar desde o Cosmódromo GIK-5 Baikonur para colocar em órbita o satélite astronómico CoRoT. Este lançamento dependeria dos resultados de novos ensaios do motor RD-0124 que tiveram lugar em Março e Abril de 2006. Um último teste teve lugar a 20 de Outubro de 2006 e o satélite CoRoT acabaria por ser lançado a 21 de Dezembro desse ano.
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5865
– Lançamento orbital Rússia: 3247 (55,36%)
– Lançamento orbital desde Baikonur: 1496 (25,51% – 46,07%)
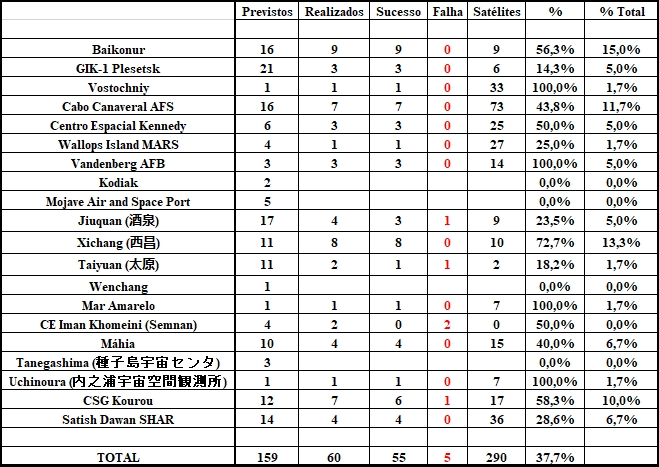
Os quadro seguinte mostra os lançamentos previstos e realizados em 2019 por polígono de lançamento.
Os próximos lançamentos orbitais previstos são (hora UTC):
5866 – 22 Ago (1300:30) – Delta-IV-M+(4,2) (D384) – Cabo Canaveral AFS, SLC-37B – GPS-III SV02 “Magellan”
5867 – 29 Ago (????:??) – KZ-1A Kuaizhou-1A (Y10) – Jiuquan, LC43/95 – KX-09
5868 – ?? Ago (????:??) – 14A14-1A Soyuz-2.1a/Fregat-M – GIK-1 Plesetsk, LC43/4 – 14F01-1 Neitron
5869 – 10 Set (????:??) – Vega (VV16) – CSG Kourou, ZLV – Esail, Athena, Astrocast-1.1, Astrocast-1.2, Astrocast-1.3, Astrocast-1.4, Astrocast-1.5, Astrocast-1.6, Astrocast-1.7, Astrocast-1.8, Astrocast-1.9,Astrocast-1.10, GHGSat-C1, Lemur-2y, PICASSO, SIMBA, DIDO-3, Royal Thai Air Force cubesat, NEMO-HD, TRISAT, FSSCat-A, FSSCat-B, IGOSat, PINO, QARMAN, Casaa-Sat, SpaceBee (x12), D-Orbit’s ION CubeSat Carrier: Dove(x6)
5870 – 10 Set (2133:00) – H-2B (F8) – Tanegashima, Yoshinubo LP2 – HTV-8 Kounotori-8