
Concebida como uma das principais missões espaciais europeias e seguindo as pisadas da tão bem sucedida sonda Giotto, a sonda Rosetta representou um grande desafio para a ESA, a agência espacial europeia.
À primeira vista a missão poderia parecer simples: basicamente tratava-se de encontrar um cometa num dado ponto da sua órbita e largar uma pequena sonda (lander) para estudar a sua superfície. Simples, mas nem tanto. A actual missão da Rosetta representa um verdadeiro desafio para a elaboração e cálculo de uma trajectória que lhe permitou encontrar o seu alvo, o cometa 67P/Churyumov-Gerasimenko, num determinado ponto na sua órbita, acompanhá-lo e orbitá-lo.
 A missão inicial da Rosetta previa um encontro com o cometa Wirtanen (na Primavera de 2012), o seu alvo final, e a passagem pelos asteróides Otawara (em 2006) e Siwa (2008). No entanto esta missão teve de ser cancelada devido ao acidente com o primeiro Ariane-5ECA que atrasou os planos da ESA e a obrigou a repensar toda a missão, nomeando um novo alvo para a Rosetta.
A missão inicial da Rosetta previa um encontro com o cometa Wirtanen (na Primavera de 2012), o seu alvo final, e a passagem pelos asteróides Otawara (em 2006) e Siwa (2008). No entanto esta missão teve de ser cancelada devido ao acidente com o primeiro Ariane-5ECA que atrasou os planos da ESA e a obrigou a repensar toda a missão, nomeando um novo alvo para a Rosetta.
A missão da Rosetta é constituída por duas partes principais: a sonda Rosetta e o veículo de aterragem (lander) Philae.
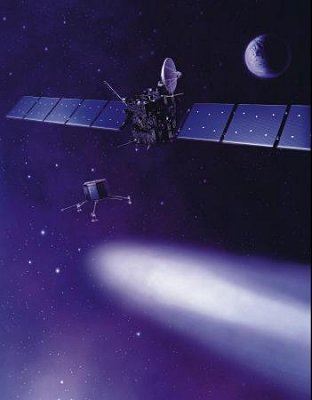
A sonda Rosetta é constituída por uma «caixa» de alumínio com um comprimento de 2,8 metros, uma largura de 2,1 metros e uma altura de 2,0 metros. No lançamento a sonda tinha uma massa de 3.000 kg, tendo 1.670 kg de propolente e 165 kg de carga científica, enquanto que o pequeno Philae tem uma massa de 100 kg. Os seus instrumentos científicos estão alojados na sua parte superior numa zona denominada Payload Support Module (PSM) enquanto que os subsistemas do veículo estão localizados na base denominada Bus Support Module (BSM). Num dos lados da sonda está localizada uma antena de comunicações com um diâmetro de 2,2 metros que pode ser orientada. O veículo de descida está colocado no lado oposto da localização da antena.
Dois painéis solares estão fixados na sonda. Cada painel tem uma área de 32 m2 e cada um é composto por cinco painéis mais pequenos. Os dois painéis podem ser rodados 180º para ambos os lados de forma a poder captar o máximo de radiação solar.
 Na vizinhança do cometa 67P/Churyumov-Gerasimenko os instrumentos científicos da sonda estavam apontados para o cometa, enquanto que a antena de comunicações e os painéis solares estavam apontados para a Terra e para ao Sol (que a tão grande distância estão mais ou menos na mesma direcção).
Na vizinhança do cometa 67P/Churyumov-Gerasimenko os instrumentos científicos da sonda estavam apontados para o cometa, enquanto que a antena de comunicações e os painéis solares estavam apontados para a Terra e para ao Sol (que a tão grande distância estão mais ou menos na mesma direcção).
O principal sistema de propulsão da sonda está localizado no centro do veículo. Montado num tubo vertical encontram-se dois tanques de propolente com o tanque superior contendo combustível e o tanque inferior contendo o oxidante. A sonda possuí também 24 motores mais pequenos para controlo de trajectória e atitude. Cada um destes motores pode impulsionar o veículo com uma força de 10 N, que é semelhante ao que uma pessoa sente quando segura um grande saco de maçãs na mão. Cerca de metade do peso no lançamento é referente ao propolente.
O módulo de descida Philae foi fabricado por um consórcio europeu dirigido pelo Instituto de Pesquisa Aeroespacial Alemão (DLR) com outros membros provenientes da Áustria, Finlândia, França, Hungria, Irlanda, Itália e Reino Unido.
O veículo será separado da Rosetta assim que a sonda esteja devidamente alinhada com o cometa 67P/Churyumov-Gerasimenko. Após a separação as três pernas do módulo serão abertas e iniciará uma descida balística que finalizará uma aterragem suave no cometa. Na aterragem as pernas do módulo irão dissipar muita da energia cinética para reduzir as possibilidades de balancear na superfície. As pernas podem também rodar, elevar-se e inclinarem-se para colocar o veículo numa posição vertical em relação à superfície do cometa. Logo após a aterragem um arpão serão disparado para segurar o veículo na superfície e prevenir assim que se afaste do cometa devido à sua fraca gravidade. 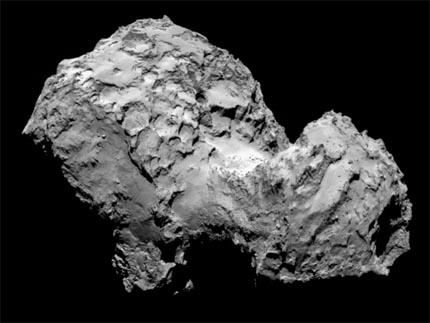 A missão na superfície do cometa deverá ter uma duração mínima de 7 dias, podendo no entanto ser prolongada por muitos mais meses.
A missão na superfície do cometa deverá ter uma duração mínima de 7 dias, podendo no entanto ser prolongada por muitos mais meses.
A estrutura do módulo consiste numa base e uma plataforma de instrumentação, tendo uma forma poligonal. O módulo é construído em fibra de carbono. Alguns dos instrumentos e subsistemas estão localizados por debaixo de uma capa coberta com células solares. Uma antena irá transmitir os dados da superfície do 67P/Churyumov-Gerasimenko para a Terra através da sonda em órbita. O Philae transporta nove experiências com uma massa total de 21 kg. Transporta também um sistema de perfuração para obter amostras do material sobre a superfície.
No total a sonda Rosetta transporta 11 instrumentos científicos:
• ALICE (Ultravilet Imaging Spectrometer) – analisará os gases na cauda e na cabeleira do cometa, medindo os níveis de produção de água, monóxido de carbono e dióxido de carbono. Irá também fornecer informação acerca da composição da superfície do núcleo.
• CONSERT (Comet Nucleos Sounding Experiment by Radiowave Transmission) – irá analisar o interior do cometa ao estudar as ondas de rádio que são reflectidas e dispersas pelo núcleo.
• COSIMA (Cometary Secondary Ion Mass Analyser) – irá analisar as características dos grãos de poeira emitidos pelo cometa, incluindo a sua composição, determinando a sua origem orgânica ou inorgânica.
• GIADA (Grain Impact Analyser and Dust Accumulator) – medirá o número, massa, momento e distribuição de velocidade dos grãos de poeira que provêm do núcleo e de outras direcções (reflectida pela pressão da radiação solar).
• MIDAS (Micro-Imaging Dust Analysis System) – estudará o ambiente de poeira em torno dos asteróides e cometa. Irá fornecer informação acerca da população de partículas, tamanho, volume e forma.
• MIRO (Microwave Instrument for the Rosetta Orbiter) – será utilizado para determinar a abundância dos gases principais, o nível de escape de gases na superfície e a temperatura da subsuperfície do núcleo. Irá também medir a temperatura das subsuperfícies dos asteróides Siwa e Otawara, e procurar por gases em torno dos asteróides.
• OSIRIS (Optical, Spectroscopic and Infrared Remote Imaging System) – é constituído por uma câmara de grande angular e por uma câmara de pequena angular que irão obter imagens de alta resolução do núcleo do cometa e dos asteróides que serão visitados pela sonda, ajudando a identificar os melhores locais para a aterragem do Philae.
• ROSINA (Rosetta Orbiter Spectrometer for Ion and Neutral Analysis) – este instrumento contém dois sensores que irão determinar a composição da atmosfera e da ionosfera do cometa, as velocidades das partículas de gás electrificadas e as reacções nas quais tomam parte. Irá também investigar a possível existência de gases nos asteróides.
• RPC (Rosetta Plasma Consortium) – Este instrumento possui cinco sensores para medir as propriedades físicas do núcleo, examinar a estrutura da cabeleira linear, monitorizar a actividades do cometa e estudar a interacção com o vento solar.
• RSI (Radio Science Investigation) – Alterações nos sinais de rádio da sonda são utilizados para medir a massa, densidade e gravidade do núcleo, para definir a órbita do cometa, e para estudar a cabeleira interior. ORSI será também utilizado para medir a massa e a densidade do asteróide Siwa e para estudar a coroa solar durante os períodos quando a sonda, tal como é vista desde a Terra, passa por detrás do Sol.
• VIRTIS (Visible and Infrared Thermal Imaging Spectrometer) – Irá mapear e estudar a natureza dos sólidos e a temperatura na superfície do núcleo. Irá também procurar identificar os gases emitidos pelo cometa, as suas caracterizar as condições físicas da cabeleira e ajudar a identificar os melhores locais de aterragem.
Por seu lado o módulo Philae possui os seguintes instrumentos:
• APXS (Alpha X-ray Spectrometer) – este aparelho será enterrado a uma profundidade de 0,04 metros no solo do cometa para tentar detectar partículas alfa e raios-x que fornecerão informação acerca da composição elementar da sua superfície.
• CIVA – constituído por seis micro-câmaras para obterem imagens panorâmicas da superfície. Um espectrómetro irá estudar a composição, textura e albedo (reflectividade) das amostras recolhidas na superfície.
• CONSERT (Comet Nucleus Sounding Experiment by Radiowave Transmission) – irá sondar a estrutura interna do núcleo. As ondas de rádio emitidas pelo CONSERT na Rosetta irão viajar através do núcleo e serão devolvidas por um repetidor no Philae.
• COSAC (Cometary Sampling and Composition experiment) – é um dos dois analisadores de gás da missão que procurará detectar moléculas orgânicas complexas desde as suas formas elementares e complexas.
• MODULUS PTOLEMY – é um analisador de gases avançado que irá obter medidas precisas dos isótopos dos elementos leves.
• MUPUS (Multi-Purpose Sensors for Surface and Subsurface Science) – irá utilizar sensores localizados na âncora do módulo Philae, na própria sonda e no exterior para medir a densidade e propriedades térmicas e mecânicas da superfície.
• ROLIS (Rosetta Lander Imaging System) – é uma câmara CCD que irá obter imagens de alta-resolução durante a descida e imagens panorâmicas em estéreo de áreas analisadas por outros instrumentos.
• ROMAP (Rosetta Lander Magnetometer and Plasma Monitor) – é um magnetómetro e monitor de plasma que irá estudar o campo magnético local e a interacção entre o cometa e o vento solar.
• SD2 (Sample and Distribution Device) – Irá perfurar o solo a uma profundidade de 0,2 metros para recolher amostras e colocá-las em diferentes dispositivos para inspecção microscópica.
• SESAME (Surface Electrical, Seismic and Acoustic Monitoring Experiments) – são três instrumentos que irão medir as propriedades das camadas exteriores do cometa. A Cometary Acoustic Sounding Surface Experiment irá medir a maneira em como as ondas sonoras viajam através da superfície. A Permittivity Probe irá investigar as características eléctricas e o Dust Impact Monitor irá medir a quantidade de poeiras que caiem de volta na superfície.
Bilhar cósmico
 A expressão “bilhar cósmico”, tão vulgarmente utilizada para as sondas Pioneer e Voyager, pode ser aplicada ao passeio que a Rosetta realizou pelo Sistema Solar. Não existe um veículo suficientemente potente para lançar a Rosetta directamente para o cometa 67P/Churyumov-Gerasimenko, obrigando os engenheiros da ESA a planear um passeio de quase dez anos que passou por zonas distintas do nosso jardim cósmico.
A expressão “bilhar cósmico”, tão vulgarmente utilizada para as sondas Pioneer e Voyager, pode ser aplicada ao passeio que a Rosetta realizou pelo Sistema Solar. Não existe um veículo suficientemente potente para lançar a Rosetta directamente para o cometa 67P/Churyumov-Gerasimenko, obrigando os engenheiros da ESA a planear um passeio de quase dez anos que passou por zonas distintas do nosso jardim cósmico.
Após o lançamento a Rosetta foi inserida numa órbita preliminar antes de ser propulsionada para o interior do Sistema Solar. A primeira fase da missão vui a sonda a afastar-se da Terra numa longa órbita que fez regressar à vizinhança do nosso planeta em Março de 2005. Nesta fase a sonda permaneceu activa e pôde observar a Terra durante a fase de maior aproximação. As operações que a sonda levou a cano envolveram principalmente a detecção, determinação orbital e verificação dos seus instrumentos. Manobras de correcção orbital tiveram lugar antes e após a máxima aproximação.
Após a primeira visita à Terra, a Rosetta viajar em direcção a Marte onde chegou em Fevereiro de 2007. Sobrevoando o planeta vermelho a uma distância de 200 km, a Rosetta levou a cabo algumas observações científicas. Após a visita a Marte a sonda dirigiu-se novamente para a Terra onde chegou em Novembro de 2007 e depois uma terceira vez em Novembro de 2009.
A Rosetta visitou também a Cintura de Asteróides, entrando num modo passivo a caminho deste. Os asteróides (2867) Steins e (21) Lutetia foram observados a uma distância de milhares de quilómetros e os dados obtidos foram transmitidos para o nosso planeta.
Entre Maio de 2011 e Janeiro de 2014 a sonda entrou nu m período de hibernação após uma grande manobra no espaço profundo. Durante este período a Rosetta atingiu a sua máxima distância do Sol (800 milhões de quilómetros) e da Terra (1.000 milhões de quilómetros).
m período de hibernação após uma grande manobra no espaço profundo. Durante este período a Rosetta atingiu a sua máxima distância do Sol (800 milhões de quilómetros) e da Terra (1.000 milhões de quilómetros).
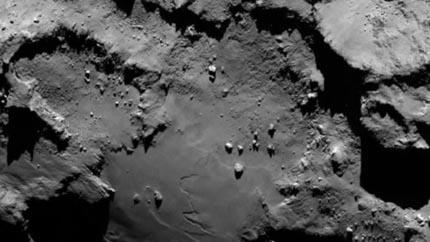
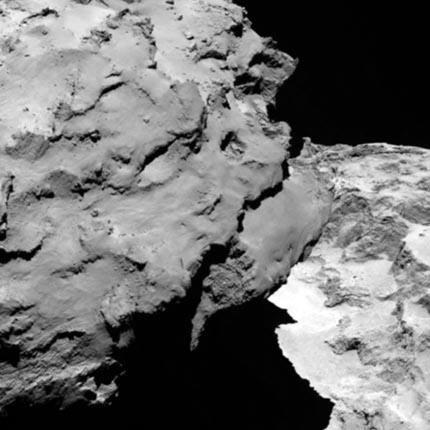
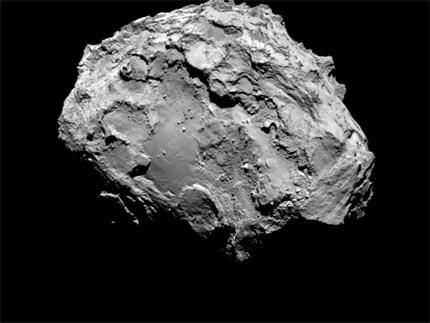
Chegando à vizinhança do cometa 67P/Churyumov-Gerasimenko em Agosto de 2014, os motores da sonda procederan à sua travagem para que o veículo ficasse colocado numa órbita semelhante à do seu alvo. Durante os seguintes seis meses ir-se-à aproximar do seu núcleo até que se encontre a uns escassos quilómetros. A Rosetta irá então acompanhar o 67P/Churyumov-Gerasimenko durante a sua viagem em direcção ao Sol.
A odisseia da Rosetta foi composta de longos períodos de inactividade, pontuados por relativamente curtos períodos de intensa actividade tais como foram as passagens por Marte, pela Terra e pelos asteróides. Um dos grandes desafios desta missão é assegurar que a sonda sobreviva aos perigos da viagem pelo espaço profundo durante mais de dez anos.
Crónica de um lançamento
 A sonda Rosetta foi colocada no seu lançador no dia 16 de Fevereiro de 2004 durante a fase de processamento levada a cabo no interior do edifício de montagem final no Centro Espacial de Kourou, Guiana Francesa. As operações de montagem do foguetão lançador Ariane-5G+ tiveram início a 19 de Janeiro com o estágio superior a ser acoplado no dia 21 de Janeiro. O abastecimento da sonda com os seus propolentes foi levado a cabo nos dias 27 e 28 de Janeiro. No dia 10 de Fevereiro o lançador foi transportado desde o edifício de integração para o edifício de montagem final. O transporte para a plataforma de lançamento ELA-3 teve lugar no dia 24 de Fevereiro. Nesta altura o lançamento estava marcado para as 0736:49UTC do dia 26 de Fevereiro, sendo no entanto adiado por 24 horas (para as 0736:50UTC) devido às más condições atmosféricas em Kourou. O lançamento seria novamente adiado devido a um problema técnico com o Ariane-5G+ quando se verificou que uma pequena parte do isolamento térmico do lançador se soltou. O lançamento seria adiado para o dia 2 de Março, havendo a necessidade de transportar o lançador para o edifício de montagem final onde foi levada a cabo a sua reparação. O foguetão Ariane-5G+ acabou por ser novamente transportado para a plataforma de lançamento ELA-3 no dia 1 de Março.
A sonda Rosetta foi colocada no seu lançador no dia 16 de Fevereiro de 2004 durante a fase de processamento levada a cabo no interior do edifício de montagem final no Centro Espacial de Kourou, Guiana Francesa. As operações de montagem do foguetão lançador Ariane-5G+ tiveram início a 19 de Janeiro com o estágio superior a ser acoplado no dia 21 de Janeiro. O abastecimento da sonda com os seus propolentes foi levado a cabo nos dias 27 e 28 de Janeiro. No dia 10 de Fevereiro o lançador foi transportado desde o edifício de integração para o edifício de montagem final. O transporte para a plataforma de lançamento ELA-3 teve lugar no dia 24 de Fevereiro. Nesta altura o lançamento estava marcado para as 0736:49UTC do dia 26 de Fevereiro, sendo no entanto adiado por 24 horas (para as 0736:50UTC) devido às más condições atmosféricas em Kourou. O lançamento seria novamente adiado devido a um problema técnico com o Ariane-5G+ quando se verificou que uma pequena parte do isolamento térmico do lançador se soltou. O lançamento seria adiado para o dia 2 de Março, havendo a necessidade de transportar o lançador para o edifício de montagem final onde foi levada a cabo a sua reparação. O foguetão Ariane-5G+ acabou por ser novamente transportado para a plataforma de lançamento ELA-3 no dia 1 de Março.
Às 0711UTC (T-6m 30s) do dia 2 de Março, tinha inicio a sequência sincronizada de lançamento. A partir deste ponto a contagem decrescente é controlada por dois computadores, estando um localizado a bordo do Ariane e o segundo no complexo de lançamento.
A pressurização dos tanques criogénicos do lançador teve início às 0713:44UTC (T-4m) e às 0714:44UTC (T-3m) a hora exacta do lançamento era introduzida no principal sistema de controlo informático. Por esta altura a pressão no interior dos tanques criogénicos era a necessária para o lançamento.
Às 0715:44UTC (T-2m) eram abertas as válvulas do motor Vulcain-1 do primeiro estágio, encerrando-se as válvulas que permitiram o arrefecimento do mesmo motor.
A T-37s (0717:11UTC) deu-se início à sequência automática de ignição e o sistema de supressão por água foi activado na plataforma de lançamento às 0717:18UTC (T-30s). Este sistema inunda por completo a base da plataforma de lançamento reduzindo os efeitos nocivos das ondas de choque provocadas pela ignição dos motores do Ariane-5G+.
Às 0717:26UTC (T-22s) o controlo dos segundos finais da contagem decrescente passou para o computador de bordo do Ariane e às 0717:32UTC (T-18s) foi iniciado arrefecimento do sistema de hidrogénio líquido no interior do motor Vulcain-1. A T-6s (0717:38UTC) entrou em funcionamento o sistema de eliminação de hidrogénio residual na base do motor do Ariane-5 que tem por objectivo queimar o hidrogénio residual que eventualmente se possa ter libertado para a plataforma de lançamento.
A T-3s (0717:41UTC) os dois sistemas de orientação inercial entram em modo de voo e a ignição do motor Vulcain teve lugar às 0717:44UTC (T=0s). Entre os T+4s (0717:48UTC) e os T+7s (0717:51UTC) é levado a cabo uma verificação dos parâmetros de funcionamento do motor e como não foi verificado qualquer problema deu-se a ignição dos dois propulsores laterais de combustível sólido às 0717:51UTC (T+7s), com o veículo Ariane 5G+ (V158/L518 “Ville de Colleferro”) a abandonar a plataforma às 0717:51,3UTC (T+7,3s).
Após abandonar a plataforma o lançador executou uma manobra de rotação e translação, colocando-se numa trajectória em direcção a Este sobre o Oceano Atlântico.
Durante a fase inicial do lançamento os dois propulsores laterais de combustível sólido fornecem 90% da força que eleva o veículo. A separação destes dois propulsores teve lugar às 0720:17UTC (T+2m 30s) após o final da sua queima, caindo no Oceano Atlântico.
A separação da ogiva de protecção do lançador separou-se às 0720:59UTC (T+3m 15s). A separação da ogiva de protecção é levada a cabo pela ignição de dois dispositivos pirotécnicos que dividem a ogiva em duas metades. A ignição dos dispositivos origina uma força que faz com que as duas partes da ogiva se afastem do lançador. Nesta altura o lançador encontrava-se a uma altitude de 108 km e viajava a uma velocidade de 2,3 km/s.
Às 0721:44UTC (T+4m) o veículo encontrava-se a uma altitude de 131 km e viajava a uma velocidade de 2,6 km/s. A partir das 0723:59UTC (T+6m 15s) o lançador deixou de ganhar altitude, aumento assim a sua velocidade. Nesta fase o veículo encontrava-se a uma altitude de 158 km e viajava a uma velocidade de 3,4 km/s.
 O Ariane começou novamente a ganhar altitude às 0727:14UTC (T+9m 30s), encontrando-se a uma altitude de 158 km e a uma velocidade de 7,5 km/s.
O Ariane começou novamente a ganhar altitude às 0727:14UTC (T+9m 30s), encontrando-se a uma altitude de 158 km e a uma velocidade de 7,5 km/s.
O final da queima do motor Vulcain-1 teve lugar às 0728:14UTC (T+10m 30s), dando-se a separação do estágio logo de seguida. Este primeiro estágio entrou numa trajectória suborbital reentrando na atmosfera terrestre sobre o Oceano Pacífico. Após a separação do primeiro estágio o estágio superior do lançador contendo a sonda Rosetta, entrou num arco balístico durante 90 minutos viajando até uma altitude de 3.800 km antes de iniciar uma descida. Às 0910:44UTC (T+1h 53m 00s) o conjunto encontrava-se a uma altitude de 1.000 km e a uma velocidade de 7,2 km/s.
Às 0914:29UTC (T+1h 56m 45s), e a uma altitude de cerca de 650 km, o motor do estágio superior entrou em ignição. Esta ignição teve uma duração de 17 minutos fazendo com o estágio passasse a 225 km da superfície terrestre. Às 0914:44UTC (T+1h 58m) o conjunto encontrava-se a uma altitude de 540 km e a uma velocidade de 7,8 km/s.
A queima deste estágio era finalizada às 0931:26UTC (T+1h 13m 42s) iniciando-se um procedimento de orientação de atitude antes da separação da Rosetta que teria lugar às 0932:44UTC (T+2h 15m).
Imagens: ESA / Arianespace