
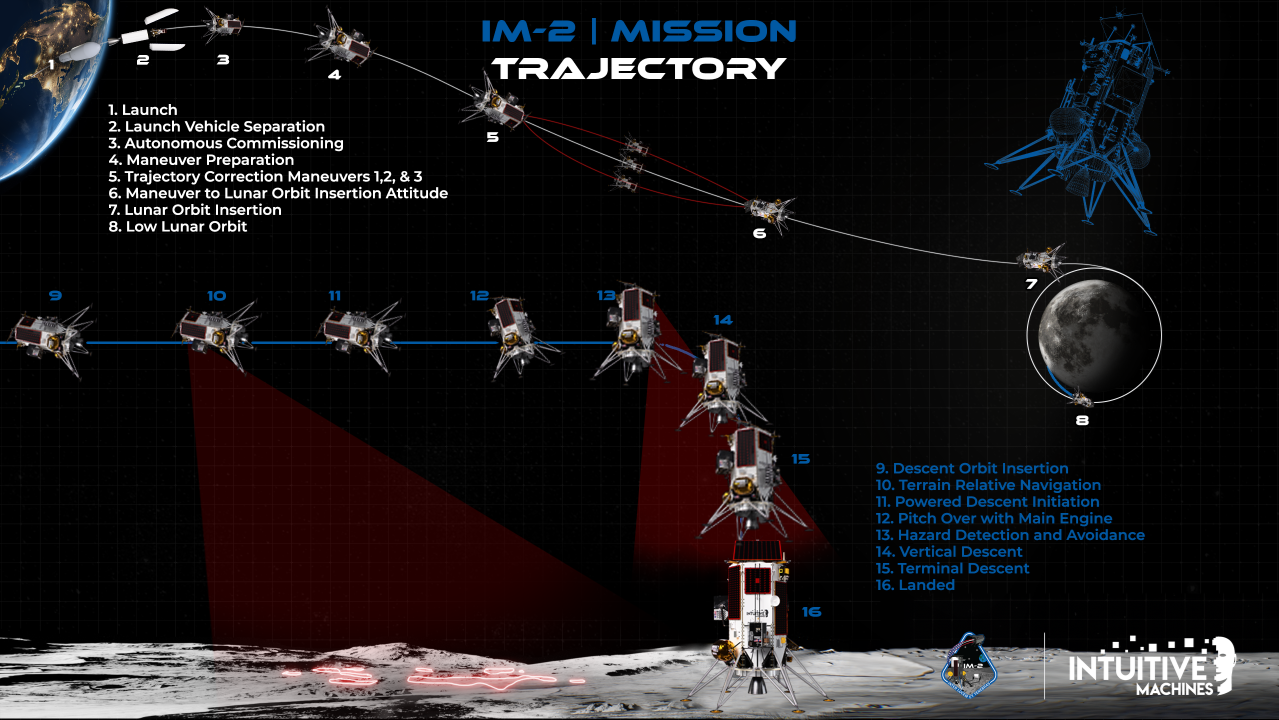
O veículo lunar não tripulado NOVA-C IM-2 da Intuitive Machines foi lançado às 0016:31UTC do dia 27 de Fevereiro de 2025.
O lançamento foi realizado pelo foguetão Falcon 9-441 ( B1083.9) a partir do Complexo de Lançamento LC-39A do Centro Espacial Kennedy, Ilha de Merritt, Florida. Todas as fases do lançamento decorreram sem problemas e o primeiro estágio B1083 foi recuperado com sucesso na plataforma flutuante A Shortfall Of Gravitas, no Oceano Atlântico.
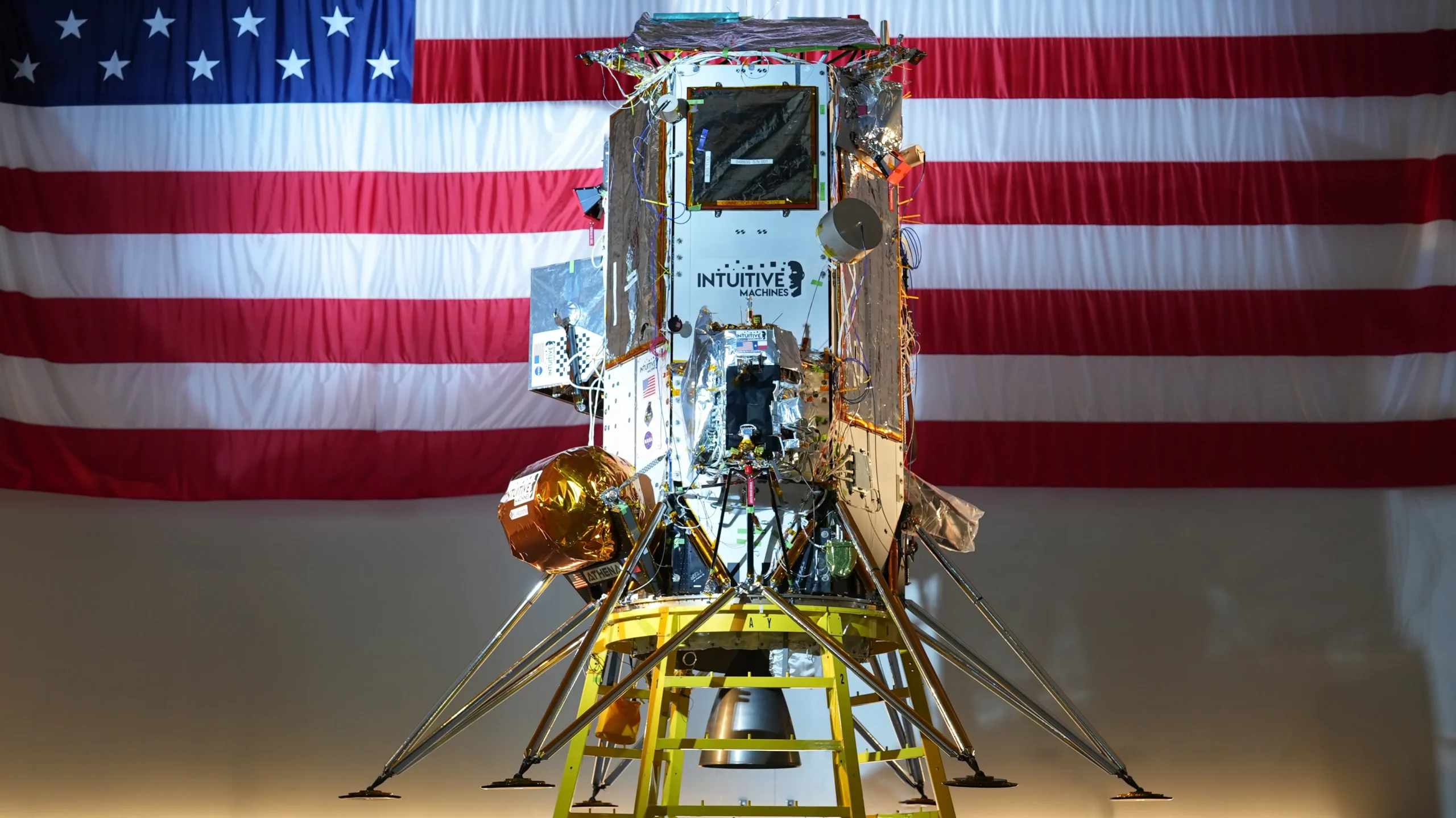
A principal carga útil da missão no veículo IM-2 é um módulo de alunagem comercial construído pela Intuitive Machines, Houston, Texas. O módulo de aterragem IM-2, o NOVA-C “Athena”, segue a missão IM-1 parcialmente bem-sucedida que aterrou perto da cratera Malapert A na região polar sul lunar a 22 de Fevereiro de 2024. O IM-2 faz parte do serviço comercial da NASA, Commercial Lunar Payload Services (CLPS), transportando uma carga útil de demonstração científica e tecnológica e voar outras cargas úteis comerciais.
Tal como a missão anterior da Intuitive Machines, a missão Odysseus, o veículo Atena também irá descer na região polar sul lunar. O Athena deverá alunar em Mons Mouton, nome dado em homenagem à matemática Melba Mouton, uma das primeiras “computadoras humanas” que trabalhou em trajetórias de naves espaciais para a NASA. As crateras nesta região podem ser suficientemente profundas para que partes dos seus fundos fiquem permanentemente à sombra, e isto pode ter permitido que os depósitos de gelo de água de impactos de cometas existissem abaixo da superfície nas áreas sombreadas.
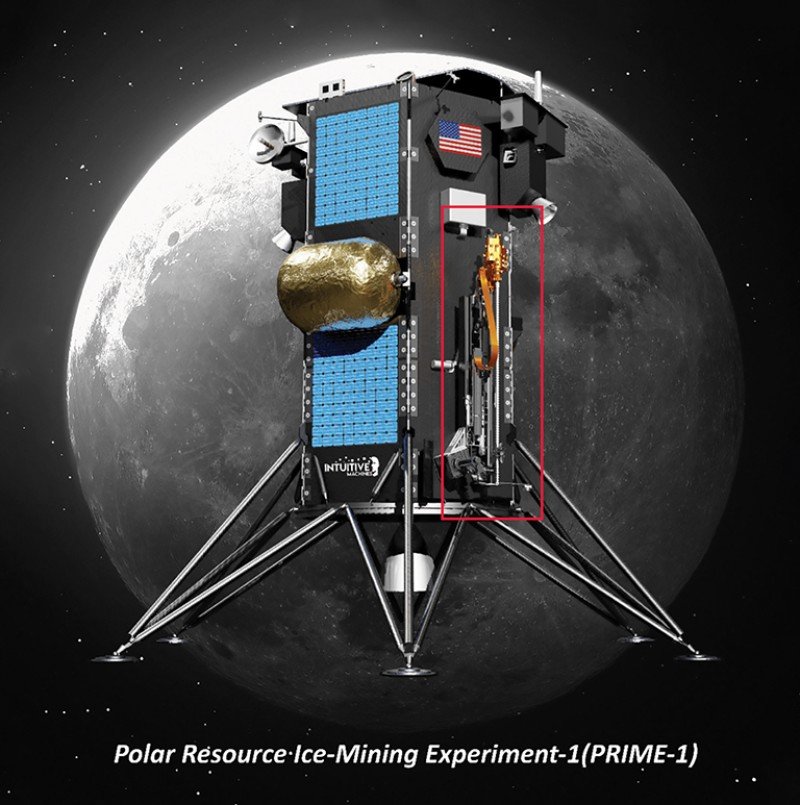
Com mais de 4,5 m de altura, 1,5 m de largura e uma massa total de 2.741 kg, o veículo de alunagem Athena transporta um pacote experimental da NASA de 36 kg, conhecido como Polar Resources Ice Mining Experiment-1 (PRIME-1). O PRIME-1 utilizará duas experiências para determinar se existe gelo de água no ambiente local de alunagem e se é prático utilizar este gelo de água como um recurso in situ.
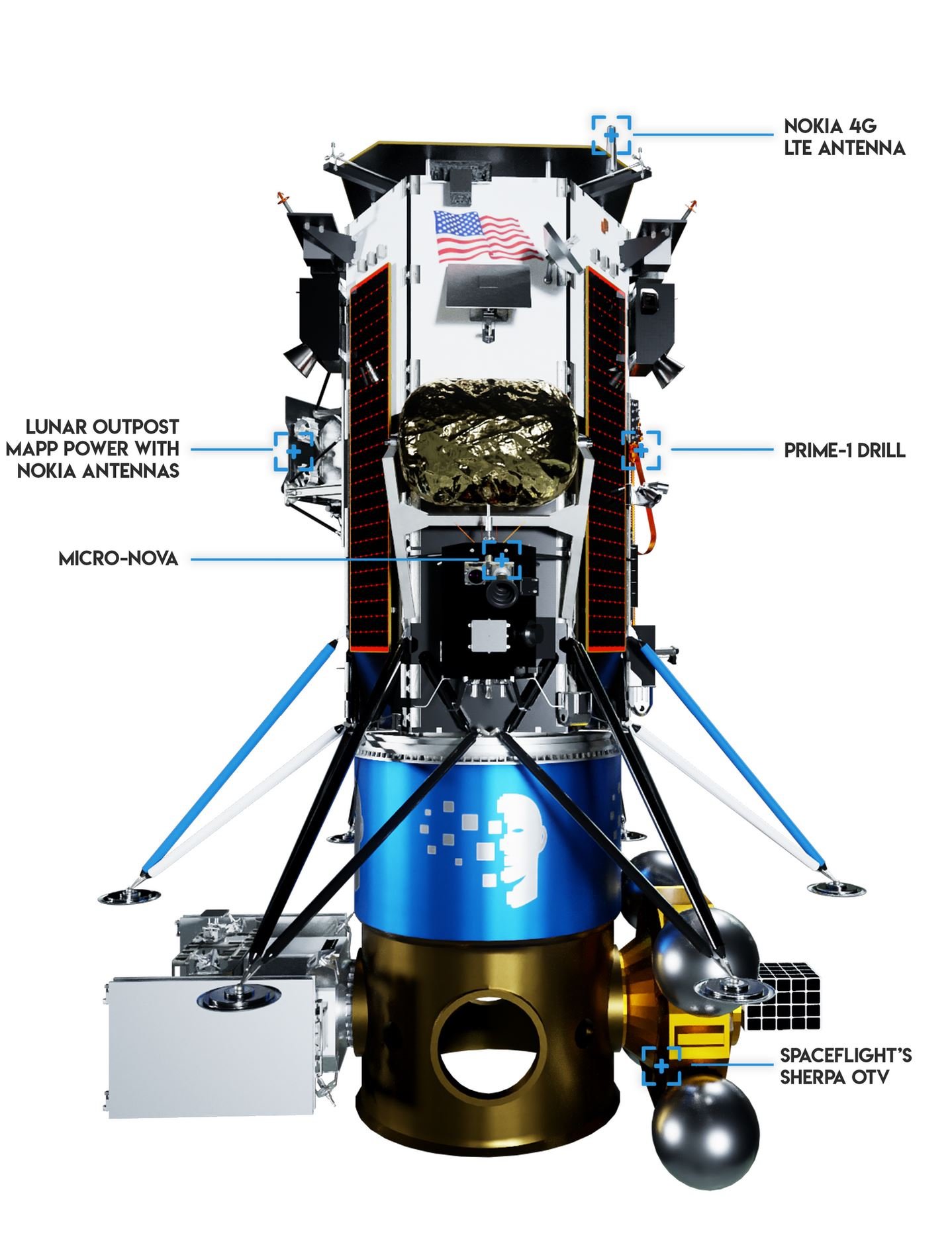
O primeiro instrumento do PRIME-1 é uma broca robótica conhecida como The Regolith and Ice Drill for Exploring New Terrain (TRIDENT). A broca TRIDENT pode extrair regolito lunar até um metro abaixo da superfície e perfurar em vários segmentos para que o solo de qualquer profundidade inferior a um metro possa ser examinado.
 O segundo instrumento PRIME-1 é o Mass Spectrometer for Observing Lunar Operations (MSOLO). O MSOLO é um espectrómetro de massa que analisará os cortes do TRIDENT em busca de água e outros compostos químicos. Uma versão do MSOLO seria utilizada a bordo do rover VIPER cancelado, que também estava planeado para procurar gelo de água.
O segundo instrumento PRIME-1 é o Mass Spectrometer for Observing Lunar Operations (MSOLO). O MSOLO é um espectrómetro de massa que analisará os cortes do TRIDENT em busca de água e outros compostos químicos. Uma versão do MSOLO seria utilizada a bordo do rover VIPER cancelado, que também estava planeado para procurar gelo de água.
A bordo são também transportados dois pequenos veículos lunares e um funil lunar, que se afastarão do módulo de aterragem e explorarão a superfície. O Mobile Autonomous Prospecting Platform (MAPP), desenvolvida pelo Lunar Outpost, vai testar o Lunar Surface Communications System (LSCS) da Nokia Bell Labs, uma rede móvel derivada de 4G LTE para comunicações na superfície lunar. Espera-se que o MAPP seja o primeiro rover comercial a operar noutro corpo planetário e o primeiro rover na região polar sul lunar.
O rover MAPP contém três cargas do Instituto de Tecnologia de Massachusetts. As cargas úteis do MIT são uma câmara de alta resolução, um robô em miniatura conhecido como AstroAnt e uma pastilha de silício contendo uma coleção de pensamentos e reflexões em línguas nativas. O AstroAnt foi concebido para inspecionar futuros assentamentos lunares enquanto a câmara irá recolher dados para um ambiente virtual para treino de astronautas.
O LSCS, montado no módulo de alunagem Athena, foi financiado pela Direção de Missão de Tecnologia Espacial da NASA como uma demonstração de tecnologia “Tipping Point”. Mais uma demonstração do Tipping Point no IM-2, um pequeno veículo “hopper”, construído pela Intuitive Machines e que apresenta uma nova capacidade de conduzir a exploração longe do local de aterragem. Este demonstrador também testará o LSCS.
O “hopper” da Micro Nova, chamado “GRACE” em homenagem à pioneira da computação Grace Hopper, utilizará pequenos jatos para saltar entre locais de aterragem na superfície lunar. A sua exploração culminará na primeira aterragem numa pequena cratera permanentemente sombreada para medir temperaturas e presença de gelo de água. O GRACE pode deslocar-se até 25 km do local de aterragem do Athena e transportar uma carga útil até 10 kg.
Para esta missão, o GRACE leva dois instrumentos. A Agência Espacial Alemã forneceu o instrumento Lunar Radiometer, que medirá as temperaturas da superfície e mapeará as variações de temperatura. Por seu lado, a Puli Space Technologies Ltd., Hungria, forneceu o Puli Lunar Water Snooper para recolher dados de gelo de água e medições de radiação.
Uma empresa japonesa, a Dymon Co. Ltd., construiu um pequeno veículo espacial para ser implantado à superfície. O rover, conhecido como YAOKI, foi concebido para captar imagens da superfície lunar enquanto se desloca até 50 m do módulo de aterragem Athena. O YAOKI é a primeira carga útil comercial japonesa da Intuitive Machines e será lançada cinco dias após a aterragem da Athena.
Outras cargas úteis a bordo do Athena incluem um conjunto de retrorreflectores laser do Centro de Voo Espacial Goddard da NASA. Várias missões de descida na superfície lunar foram equipadas com refletores para ajudar a medir com precisão a distância exata da Lua à Terra e obter uma leitura exata da localização de um módulo de aterragem na Lua.
 O módulo de descida também transporta uma carga útil conhecida como Freedom, que foi desenvolvida pela Lonestar Data Holdings. Esta carga é um pequeno centro de armazenamento de dados que pode fornecer serviços globais de cópia de segurança, atualização e restauro de dados. A empresa tem como objetivo fornecer serviços de data center do espaço cislunar e da superfície lunar em futuras missões à Lua.
O módulo de descida também transporta uma carga útil conhecida como Freedom, que foi desenvolvida pela Lonestar Data Holdings. Esta carga é um pequeno centro de armazenamento de dados que pode fornecer serviços globais de cópia de segurança, atualização e restauro de dados. A empresa tem como objetivo fornecer serviços de data center do espaço cislunar e da superfície lunar em futuras missões à Lua.
A alunagem
A alunagem ocorreu a 6 de Março, mas não com os resultados desejados.
O módulo Athena aterrou a 250 metros do local pretendido, na região de Mons Mouton, no polo sul lunar, dentro de uma cratera. Imagens enviadas desde a superfície lunar confirmaram que o Athena estava tombado de lado. Após a aterragem, os controladores da missão conseguiram acelerar vários marcos do programa e da carga útil, incluindo o conjunto PRIME-1 da NASA, antes que as baterias do módulo de aterragem se esgotassem.
Com a direção do Sol, a orientação dos painéis solares e as temperaturas extremamente baixas na cratera, a Intuitive Machines não espera que o Athena recarregue. A missão foi concluída e as equipas continuam a avaliar os dados recolhidos ao longo da missão.
Esta região do polo sul é iluminada por ângulos severos do Sol e tem uma comunicação directa limitada com a Terra. Esta área foi evitada devido ao seu terreno acidentado e a Intuitive Machines acredita que os insights e as conquistas do IM-2 abrirão esta região para futuras explorações espaciais.
Várias outras missões foram lançadas juntamente com o veículo IM-2, tais como a missão Lunar Trailblazer, CHIMERA GEO-1 e o Odin (Brokkr-2).
A missão Lunar Trailblazer foi desenvolvida pelo Laboratório de Propulsão a Jacto (Jet Propulsion Laboratory), da NASA, tratando-se de um pequeno orbitador lunar que faz parte do programa Small Innovative Missions for Planetary Exploration (SIMPLEX). Tem como missão mapear a água na superfície a partir da órbita lunar. Com uma massa de 210 kg e três metros de largura, o Lunar Trailblazer irá utilizar uma trajectória lenta e com baixo consumo de combustível até à Lua antes de se inserir numa órbita científica operacional a 100 km de altitude.

A sonda utilizará um espectrómetro infravermelho fornecido pelo JPL e um gerador de imagens multiespectrais infravermelho fornecido pela Agência Espacial do Reino Unido para medir a presença de água e as suas formas na Lua. A missão principal está programada para durar dois anos.
 A missão Odin (massa de 105 kg), desenvolvida pela AstroForge, voará para um pequeno asteróide próximo da Terra, conhecido como 2022 OB5. Com uma massa de 100 kg, o Odin chegará ao asteróide 11 meses após o lançamento, se tudo correr como planeado, e tirará fotografias ao asteróide, que pode ser metálico, durante o sobrevoo. A AstroForge pretende minerar asteróides em busca de metais do grupo da platina em missões futuras.
A missão Odin (massa de 105 kg), desenvolvida pela AstroForge, voará para um pequeno asteróide próximo da Terra, conhecido como 2022 OB5. Com uma massa de 100 kg, o Odin chegará ao asteróide 11 meses após o lançamento, se tudo correr como planeado, e tirará fotografias ao asteróide, que pode ser metálico, durante o sobrevoo. A AstroForge pretende minerar asteróides em busca de metais do grupo da platina em missões futuras.
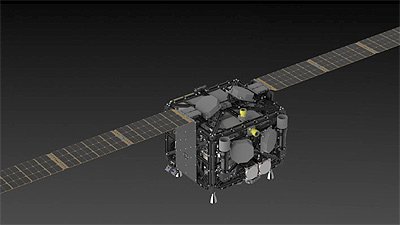
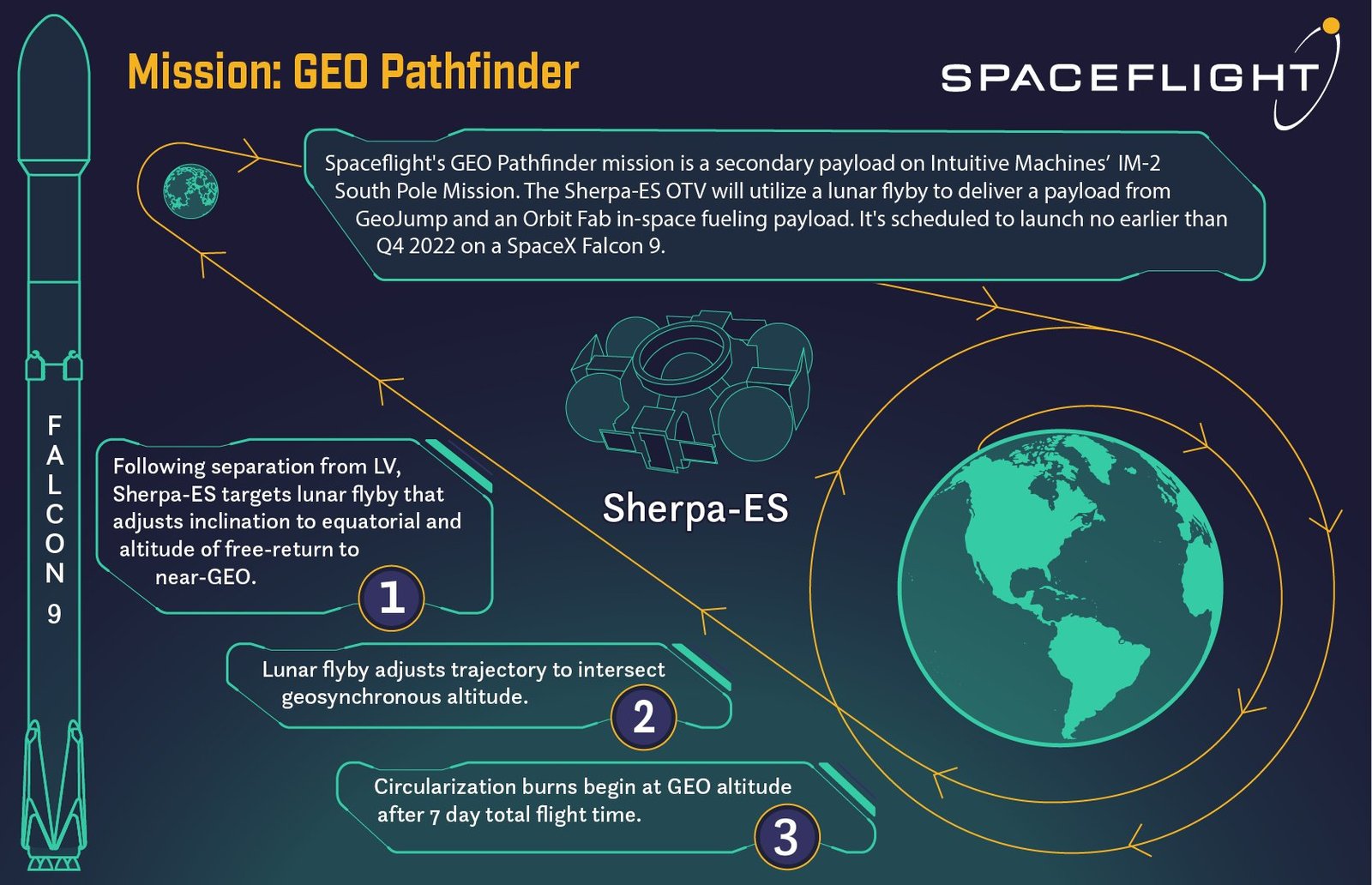
A Epic Aerospace participou neste lançamento com a sua nave espacial Chimera GEO 1. O GEO, com aproximadamente 306 kg, é um veículo de transferência orbital capaz de realizar transferências orbitais de alta energia e segue o veículo Chimera LEO que voou na missão Transporter-6.
Lançamento
A cerca de dez horas do lançamento procedeu-se à activação eléctrica do foguetão Falcon-9. Tanto o lançador como a sua carga são submetidos a uma série de verificações testes antes do início do abastecimento do querosene RP-1. O Director de Voo consulta os controladores a T-38m, determinando assim se tudo está pronto para o início do abastecimento do lançador.  O processo de abastecimento de RP-1 inicia-se a T-35m no primeiro estágio, seguindo-se o início do abastecimento do oxigénio líquido (LOX) na mesma altura. O abastecimento de LOX ao segundo estágio inicia-se a T-16m.
O processo de abastecimento de RP-1 inicia-se a T-35m no primeiro estágio, seguindo-se o início do abastecimento do oxigénio líquido (LOX) na mesma altura. O abastecimento de LOX ao segundo estágio inicia-se a T-16m.
A fase terminal da contagem decrescente inicia-se com os motores a serem condicionados termicamente para o lançamento a T-7m. A T-1m é enviado um comando para o computador de voo para iniciar as verificações pré-lançamento e o sistema de supressão sónica é activado na plataforma de lançamento inundada por milhões de litros de água. Por esta altura os tanques de propelente também são pressurizados. A T-45s o Director de Lançamento da SpaceX verifica se todos os parâmetros estão prontos para a missão, sendo também verificado que o espaço aéreo está pronto para o lançamento. A sequência de ignição é iniciada a T-3s. A T=0s o foguetão abandona a plataforma.
Abandonando a plataforma de lançamento, o Falcon-9 inicia uma série de manobras para se colocar na trajectória de voo correcta. A fase MaxQ, de máxima pressão dinâmica, é atingida a T+1m 18s, sendo nesta altura que o lançador atinge o ponto mais elevado de ‘stress’ mecânico na sua estrutura.
O final da queima do primeiro estágio (MECO – Main Engine Cut-Off) ocorre a T+2m 30s, dando-se quatro segundos depois a separação entre o primeiro e o segundo estágio, com este a entrar em ignição a T+2m 42s (SES-1 Stage Engine Start 1). A ejecção das duas metades da carenagem de protecção ocorre a T+3m 27s.
A queima de reentrada do primeiro estágio ocorre entre T+6m 15s e T+6m 41s. O final da queima do segundo estágio – (SECO-1 Second Engine Cut Off 1) – ocorre a T+7m 55s. A queima de aterragem ocorre entre T+8m 1s e T+8m 31s, sendo recuperado com sucesso.
O segundo estágio executa uma segunda queima entre T+36m 25s e T+37m 26s. A separação do veículo Athena ocorre a T+43m 38s, seguindo-se a separação do veículo Odin a T+47m 28s. A separação do Lunar Traiblazer ocorre a T+47m 48 e a separação do CHIMERA GEO-1 ocorre a T+48m 8s.
O foguetão Falcon-9
Baptizado em nome da nave Millenium Falcon da saga cinematográfica “Guerra das Estrelas”, o foguetão Falcon-9 v1.1 foi um lançador a dois estágios projectado e fabricado para o transporte seguro e fiável de satélites e do veículo Dragon para a órbita terrestre. Sendo o primeiro foguetão completamente desenvolvido no Século XXI, este lançador foi projectado desde o início para ter a máxima fiabilidade. A sua simples configuração de dois estágios minimiza o número de eventos de separação (staging) e com nove motores no primeiro estágio, pode completar a sua missão em segurança mesmo na possibilidade de perda de um motor.
O Falcon-9 fez história em 2012 quando colocou a cápsula Dragon na órbita correcta para uma manobra de encontro com a estação espacial internacional. Desde então, foram realizadas múltiplas missões para a ISS transportando e recolhendo carga para a NASA. O Falcon-9, bem como a cápsula Dragon, foram desenhados na base do desenvolvimento de um sistema de transporte de astronautas para o espaço.
O foguetão Falcon-9 Upgrade, ou Falcon-9 FT, (a seguir designado simplesmente como “Falcon-9”) representa a mais recente evolução deste lançador. De forma geral, o Falcon-9 tem 68,4 metros de comprimento, 3,7 metros de diâmetro e uma massa de 541.300 kg. O veículo é capaz de colocar uma carga de 13.150 kg numa órbita terrestre baixa ou 4.850 kg numa órbita de transferência geossíncrona.

O primeiro estágio do Falcon-9 está equipado com nove motores Merlin (Merlin-1D) e tanque de liga de alumínio e lítio que contêm oxigénio líquido e querosene RP-1. Após a ignição, um sistema de segurança fixa o veículo na plataforma de lançamento e garante que todos os motores são verificados como estando na força máxima antes de libertar o foguetão para o seu voo. Então, com uma força superior a cinco aviões Boeing 747 em potência máxima, os motores Merlin lançam o foguetão para o espaço. Ao contrário dos aviões, a força de um foguetão vai aumentando com a altitude – o Falcon-9 gera 6.806 kN ao nível do mar, mas atinge 7.426 kN no vácuo espacial. Os motores do primeiro estágio vão sendo aumentados em potência perto do final da queima do estágio para assim limitar a aceleração do veículo à medida que a massa do lançador diminui com a queima do combustível. O tempo total de queima do primeiro estágio é de 162 segundos.
Com os seus nove motores agrupados juntos na configuração ‘octaweb’, o Falcon-9 pode aguentar a falha de até dois motores durante o lançamento e mesmo assim conseguir atingir a órbita terrestre com sucesso. O Falcon-9 é o único lançador na sua classe com esta característica chave.
O motor Merlin vai encontrar as suas raízes aos motores das missões Apollo, nomeadamente o sistema de injecção baseado no motor do módulo lunar. O propelente é alimentado por uma única conduta, com uma turbo bomba de dupla pá que opera num ciclo de gerador a gás. A turbo bomba também fornece o querosene a alta pressão para os actuadores hidráulicos, que depois recicla para a entrada a baixa pressão. Isto elimina a necessidade de um sistema hidráulico separado e significa que não é possível ocorrer uma falha no controlo de vector de força por falta de fluido hidráulico. Uma terceira utilização da turbo bomba é o fornecimento de controlo de rotação ao actuar no escape da turbina de exaustão (no segundo estágio). Combinando-se estas características num só dispositivo aumenta-se assim de forma significativa o nível de fiabilidade do sistema.
O motor é capaz de desenvolver uma força de 654 kN ao nível do mar, 716 kN no vácuo, com um impulso específico de 282 segundos (nível do mar) e 311 segundos (vácuo).
A secção interestágio é uma estrutura compósita que liga o primeiro e o segundo estágio e alberga os sistemas de libertação e separação. O Falcon-9 utiliza um sistema de separação totalmente pneumático para uma separação de baixo impacto e altamente fiável que pode ser testado no solo, ao contrário dos sistemas pirotécnicos utilizados na maior parte dos lançadores.
O segundo estágio é propulsionado por um único motor Merlin de vácuo e coloca a carga a transportar na órbita desejada. O motor do segundo estágio entra em ignição poucos segundos após a separação entre o segundo e o primeiro estágio, e pode ser reiniciado várias vezes para colocar múltiplas cargas em diferentes órbitas. Para máxima fiabilidade, o segundo estágio está equipado com sistemas de ignição redundantes. Tal como o primeiro estágio, o segundo estágio é feito a partir de uma liga de alumínio e lítio.
O motor Merlin de vácuo (Merlin-1D de vácuo) desenvolve uma força de 934 kN e o seu tempo de queima é de 397 segundos.
A carenagem compósita é utilizada para proteger a carga durante a passagem do Falcon-9 pelas camadas mais densas da atmosfera. Quando a missão do Falcon-9 é o lançamento do veículo de carga Dragon, a carenagem não é utilizada, pois a cápsula possui o seu próprio sistema de protecção.
A carenagem tem 13,1 metros de comprimento e 5,2 metros de diâmetro. Fabricada em fibra de carbono, separa-se em duas metades utilizando um sistema de separação de actuadores pneumáticos semelhantes aos que são utilizados para a separação entre o primeiro e o segundo estágio.
A sequência de lançamento para o Falcon-9 é um processo de precisão ditada pela janela de lançamento tendo em conta a posição orbital a ser ocupada pela carga a bordo. Se a janela de lançamento é perdida, a missão é então adiada para a próxima janela de lançamento disponível.
Cerca de quatro horas antes do lançamento, inicia-se o processo de abastecimento – primeiro oxigénio líquido seguindo-se o querosene altamente refinado (RP-1). O vapor observado a sair do lançador durante a contagem decrescente é na realidade oxigénio a ser liberto dos tanques, sendo esta a razão pela qual o abastecimento de oxigénio líquido se mantém até quase ao final da contagem decrescente.
| Lançamento | Veículo | 1.º estágio | Local Lançamento | Data Hora (UTC) | Carga | Recuperação |
| 2025-024 | 432 | B1069.21 | CCSFS, SLC-40 | 04/Fev/25 10:15:00 | Starlink G12-3 | JRTI |
| 2025-025 | 433 | B1086.4 | KSC, LC-39A | 04/Fev/25 23:13 |
WorldView Legion 5 WorldView Legion 6 |
LZ-1 |
| 2025-027 | 434 | B1078.17 | CCSFS, SLC-40 | 04/Fev/25 19:18:30 | Starlink G12-9 | ASOG |
| 2025-029 | 435 | B1071.23 | VSFB, SLC-4E | 11/Fev/25 02:09:40 | Starlink G11-10 | OCISLY |
| 2025-031 | 436 | B1077.18 | CCSFS, SLC-40 | 11/Fev/25 18:53:20 | Starlink G12-18 | JRTI |
| 2025-032 | 437 | B1967.26 | CCSFS, SLC-40 | 15/Fev/25 06:14:10 | Starlink G12-8 | ASOG |
| 2025-034 | 438 | B1080.16 | CCSFS, SLC-40 | 18/Fev/25 23:21:50 | Starlink G10-12 | JRTI |
| 2025-035 | 439 | B1076.21 | CCSFS, SLC-40 | 21/Fev/25 15:10:00 | Starlink G12-14 | ASOG |
| 2025-037 | 440 | B1082.11 | VSFB, SLC-4E | 23/Fev/25 01:38:20 | Starlink G15-1 | OCISLY |
| 2025-038 | 441 | B1083.9 | KSC, LC-39A | 27/Fev/25 00:16:31 |
Nova-C IM-2 “Athena” Lunar Trailblazer CHIMERA GEO-1 Odin (Brokkr-2) |
ASOG |
Imagens: Da empresa lançadora