

A Índia levou a cabo o lançamento do satélite militar EMISat juntamente com outros 28 pequenos satélites e mais uma vez aproveitando o último estágio do foguetão lançador como plataforma experimental orbital. Nesta missão foi também utilizada pela primeira vez uma nova versão do foguetão PSLV.
O lançamento da missão PSLV-C45 teve lugar às 0357UTC do dia 1 de Abril de 2019 e foi levada a cabo a partir da Plataforma de Lançamento SLP (Second Launch Pad) do Centro Espacial Satish Dawan SHAR, Ilha de Sriharikota.
Com um azimute de lançamento de 140º desde o Centro Espacial Satish Dawan, o foguetão PSLV-QL tinha como missão colocar o satélite EMISat a uma altitude de 749 km, numa órbita com uma inclinação de 98,376º em relação ao equador terrestre. Após a separação do EMISat, deu-se a separação dos restantes satélites a uma altitude de 504 km (inclinação de 97,468º) e posteriormente, o estágio PS4 é colocado numa órbita com uma altitude média de 485 km e inclinação orbital de 97,468º, estabelecendo-se como uma plataforma orbital contendo várias cargas.
Lançamento
O lançamento da missão PSLV-C45 iniciou-se com a ignição do primeiro estágio a T=0s, seguindo-se a T+0,42s a ignição dos dois propulsores laterais de combustível sólido PSOM XL 1 e 2, e a T+0,62s a ignição dos dois propulsores laterais de combustível sólido PSOM XL 3 e 4. A separação dos propulsores PSOM XL 1 e 2 tem lugar a T+1m 9,90s e separação dos propulsores PSOM XL 3 e 4 tem lugar a T+1m 10,1s seguindo-se a separação do primeiro estágio a T+1m 48,82s a uma altitude de 68,62 km (viajando a uma velocidade inercial de 2,01 km/s). A ignição do segundo estágio ocorre quase de imediato (T+1m 49,02s). A separação das duas metades da carenagem de protecção ocorre a T+2m 29,82s a uma altitude de 115,33 km e com o veículo a viajar a uma velocidade de 2,27 km/s.


O final da queima e separação do segundo estágio ocorre a T+4m 21,34s e a ignição do terceiro estágio ocorre a T+4m 22,54s a uma altitude de 250,68 km e a uma velocidade de 4,03 km/s. O final da queima e separação do terceiro estágio ocorre a T+8m 29,72s, a uma altitude de 560,46 km e a uma velocidade de 5,78 km/s.
A ignição do quarto estágio inicia-se a T+8m 40,12s e termina a T+16m 24,20s. O conjunto encontra-se a uma altitude de 752,86 km e a viajar a uma velocidade de 7,47 km/s.

A separação do satélite EMISat ocorre a T+17m 11,20s. A separação dos restantes satélites ocorre entre T+1h 50m 26s e T+1h 55m 1s, depois do estágio superior do foguetão lançador ter executado duas manobras orbitais entre T+1h 0m 11,52s e T+1h 0m 21,66, e entre T+1h 48m 50,52s e T+1h 49 1,00s.
Posteriormente, o estágio superior realizou duas novas manobras orbitais para atingir a sua órbita operacional onde servirá de plataforma orbital experimental.
Os satélites na missão PSLV-C45
Os satélites a bordo desta missão eram os seguintes: EMISat, Flock-4a (1) a Flock-4a (20), Lemur-2 (96) a Lemur-2 (99), BlueWalker-1 (BW-1), M6P, Astrocast-0.2, AISTECHSAT-3 (Danu Pathfinder) e a carga AIS/APRS/ARIS no estágio superior do foguetão lançador.
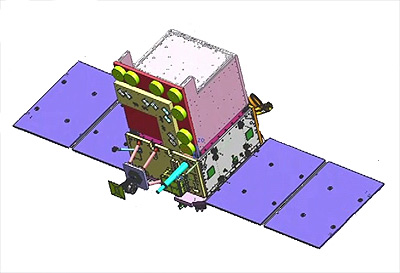
A carga principal desta missão foi o satélite militar EMISat. Baseado na plataforma Microsatellite-SSB (SSB-2), o EMISat foi desenvolvido pela ISRO e a natureza da sua carga não foi oficialmente confirmada. Porém, as imagens disponíveis do satélite coincidem na descrição da carga Kautilya destinada a obter informações de inteligência militar. No lançamento a sua massa era de 436 kg.
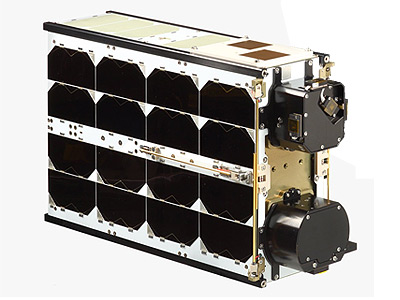
A constelação de satélites de observação da Terra, Flock, foi construída e operada pela Planet Labs (anteriormente designada Cosmogia Inc.), é composta por numerosos CubeSat-3U com uma massa de 5 kg. As constelações Flock-1 e Flock-1b são compostas por 28 satélites em órbitas inclinadas em altitudes médias. A constelação Flock-1c é composta por 11 satélites em órbitas polares.
Grande parte dos satélites contém um sistema de observação RGB standard, mas cinco satélites foram equipados com sistemas experimentais operando em diferentes bandas espectrais ópticas.
 Cada satélite transporta um telescópio e uma câmara CCD equipada com um filtro Bayer. O sensor CCD converte os fotões filtrados em electrões, que são então ampliados de forma a produzir um número digital correspondente a cada pixel em cada banda. A Planet Labs lançou três gerações de instrumentos ópticos: Planet Scope 0 (PS0), Planet Scope 1 (PS1) e Planet Scope 2 (PS2). As imagens têm diferentes atributos dependendo da altitude do satélite e do tipo de instrumento.
Cada satélite transporta um telescópio e uma câmara CCD equipada com um filtro Bayer. O sensor CCD converte os fotões filtrados em electrões, que são então ampliados de forma a produzir um número digital correspondente a cada pixel em cada banda. A Planet Labs lançou três gerações de instrumentos ópticos: Planet Scope 0 (PS0), Planet Scope 1 (PS1) e Planet Scope 2 (PS2). As imagens têm diferentes atributos dependendo da altitude do satélite e do tipo de instrumento.
O PS0 é composto por um Maksutov Cassegrain de dois elementos ópticos com um detector CCD de 11MP. Os elementos ópticos estão montados em relação à estrutura do satélite. O PS1 contém o mesmo sistema óptico do PS0 mas alinhado e montado num telescópio de fibra de carbono e titânio que se encontra isolado. Este telescópio é equipado com um detector CCD de 11MP. O PS2 é composto por um sistema óptico de cinco elementos que fornece imagens com um campo de vida largo e qualidade de imagem superior, sendo equipado com um sensor CCD de 29MP.
Nesta missão foram lançados os Flock-4a (1) a Flock-4a (20).
 Os satélites Lemur-2 são baseados no modelo CubeSat-3U e têm uma massa de 4 kg. Os satélites constituem a constelação inicial em órbita terrestre baixa construídos pela Spire, transportando duas cargas para meteorologia e seguimento do tráfego marítimo (a carga STRATOS – ocultação do sinal rádio de GPS – e a carga AIS SENSE, respectivamente).
Os satélites Lemur-2 são baseados no modelo CubeSat-3U e têm uma massa de 4 kg. Os satélites constituem a constelação inicial em órbita terrestre baixa construídos pela Spire, transportando duas cargas para meteorologia e seguimento do tráfego marítimo (a carga STRATOS – ocultação do sinal rádio de GPS – e a carga AIS SENSE, respectivamente).
A STRATOS permite a detecção do sinal GPS que é afectado quando passa através da atmosfera terrestre. Posteriormente, e utilizando um processo designado ‘ocultação do sinal GPS’, o satélite mede a alteração do sinal GPS para calcular os perfis precisos para a temperatura, pressão e humidade na Terra.
A partir do 78º Lemur-2, estes satélites transportam também a carga AirSafe ASD-B para seguimento de aviões.
Neste lançamento foram colocados em órbita os satélites Lemur-2 (96) a Lemur-2 (99).
Construído pela NanoAvionics, da Lituânia, o satélite BlueWalker-1 (BW-1) é baseado no modelo CubeSat-6U. O satélite será operado pela NanoAvionics e pela AST & Science para testar as tecnologias patenteadas desta última empresa num ambiente espacial.
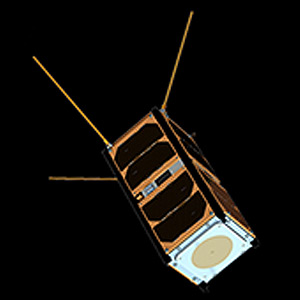
O pequeno M6P é um CubeSat-6U desenvolvido pelas empresas da Lituânia NanoAvionics, SpaceWorks Orbital e Lacuna Space.
Durante a missão, a NanoAvionics testará a sua plataforma 6U (denominada M6P – Multipurpose 6U Platform) baseada num projecto modular e altamente integrado que amplia o volume de carga útil. O M6P é o 4º Cubesat construído na Lituânia e utilizando a experiência da missão LituanicaSat-2.
O M6P será equipado com estabilização activa: magneto torques integrados e giroscópios. O satélite também incluirá dois transceptores UHF (para fins de redundância) que funcionarão com antenas tipo dipolo implantáveis.
A plataforma M6P também inclui um sistema de propulsão capaz de realizar manobras como a sua inserção orbital, manutenção orbital, compensação de arrasto atmosférico, vôo de precisão em formações, sincronização de órbita e compensação de arrasto atmosférico resultando no prolongamento da vida útil orbital do satélite. A unidade de propulsão também fornece aos satélites a capacidade utilidade de descomissionamento no final da missão, atendendo aos requisitos de mitigação de detritos espaciais da ESA e da NASA. O chamado sistema de propulsão química “verde” para atingir o TRL7 foi lançado anteriormente com PSLV C-38 e testado com sucesso em órbita durante a missão LituanicaSat-2. O experiência de propulsão a bordo do M6P trará o sistema de propulsão desenvolvido pela NanoAvionics para TRL9.

Tal como o Astrocast-0.1 colocado em órbita a 3 de Dezembro de 2018, o Astrocast-0.2 é uma missão precursora e de demonstração para a constelação da Astrocast SA. A missão é composta por dois satélites idênticos lançados com dois veículos de lançamento diferentes. O objetivo da missão é demonstrar todas as funcionalidades do satélite e operações multi-satélite.
A Astrocast é uma rede de nano satélites que fornece serviços globais de M2M (machine-to-machine) de banda-L. Os satélites orbitam numa órbita polar baixa, permitindo a criação de uma rede global que cobre todo o globo, incluindo os polos. A Astrocast estima que pode construir, lançar e operar uma constelação de 64 satélites por menos de 50 milhões de dólares para fornecer comunicações de baixa taxa de dados. A constelação será composta por oito satélites operacionais por plano orbital e oito diferentes planos orbitais em órbitas polares sincronizadas com o Sol.
Após a integração do terminal NanoLink, os activos baseados no solo podem enviar de forma confiável e segura qualquer tipo de dados para a constelação de nano satélites que reconhecerão a recepção. A Astrocast permite a transmissão de 1KB / dia de qualquer região da Terra. Uma rede geograficamente distribuída de estações terrestres recolhe os dados recolhidos pelos satélites. Os dados são então enviados para um armazenamento em nuvem para acesso pelo cliente.
Os dois satélites precursores servirão como demonstradores não apenas para o segmento espacial, mas para caracterizar o link de radiofrequência entre os objectos no solo para a demonstração e os satélites. Ambos possuem um sistema de propulsão nonosat fornecido pela GOMSpace.

Baseado na plataforma CubeSat-2U, o AISTECHSAT-3 foi desenvolvido pela GOMSpace e pela Aistech.
Os satélites desta série fornecem rastreamento de aeronave através de um receptor ADS-B. Também existe um sistema de comunicação bidirecional para enviar e receber informações automáticas de embarcações ou de activos remotos em todo o mundo.
A missão AIS / APRS / ARIS usa uma versão modificada do estágio superior do foguetão PSLV-QL que permite que seja utilizado como uma plataforma de longo prazo em órbita para a realização de experiências. A plataforma orbital PS4 está desenvolvida para fornecer um ambiente de microgravidade para organizações de pesquisa e institutos académicos para a realização de experiências. Nesta missão, o PS-4 foi o primeiro estágio superior modificado com células solares para fornecer energia eléctrica a longo prazo para as cargas úteis.
Nesta missão, o PS4 hospeda três cargas úteis: o AIS (Automatic Identification System) da ISRO – para aplicações marítimas por satélite, captando mensagens transmitidas de navios; o APRS (Automatic Packet Repeating System) da AMSAT (Radio Amateur Satellite Corporation), Índia – ajuda a radio amadores a seguir e monitorizar dados de posição; e o ARIS (Advanced Retarding Potential Analyzer for Ionospheric Studies) do Instituto Indiano de Ciência e Tecnologia Espacial (IIST) – para estudos estruturais e composicionais da ionosfera.
O foguetão PSLV
 Na missão PSLV-C45 deu-se a primeira utilização da versão PSLV-QL.
Na missão PSLV-C45 deu-se a primeira utilização da versão PSLV-QL.
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
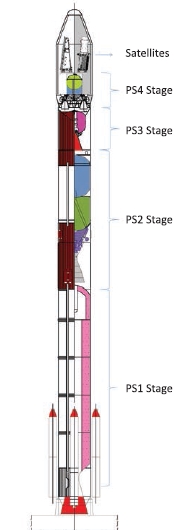
De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.

A imagem mostra as características do PSLV-C45.
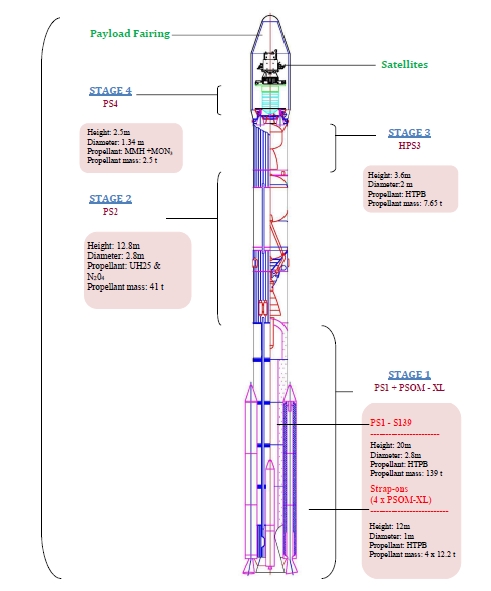 O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.

O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.

O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios: no 1º Estágio, o sistema SITVC (Secondary Injection Thrust Vector Control) é utilizado para controlo de translação, além de motores de reacção para controlo da rotação; no 2º Estágio é feita a movimentação do motor para controlo de translação e motor de controlo da rotação;
no 3º Estágio é utilizado um escape (tubeira) flexível para controlo de translação e um sistema de controlo de reacção PS-4 para controlo da rotação; no 4º Estágio é feita a movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.
Por seu lado, a versão PSLV-DL utiliza os estágios standard auxiliados por apenas dois propulsores laterais de combustível sólido, enquanto que a versão PSLV-QL utiliza os estágios standard auxiliados por quatro propulsores laterais de combustível sólido.
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5826
– Lançamento orbital Índia: 70 (1,20%)
– Lançamento orbital desde Satish Dawan SHAR: 70 (1,20% – 100,00%)
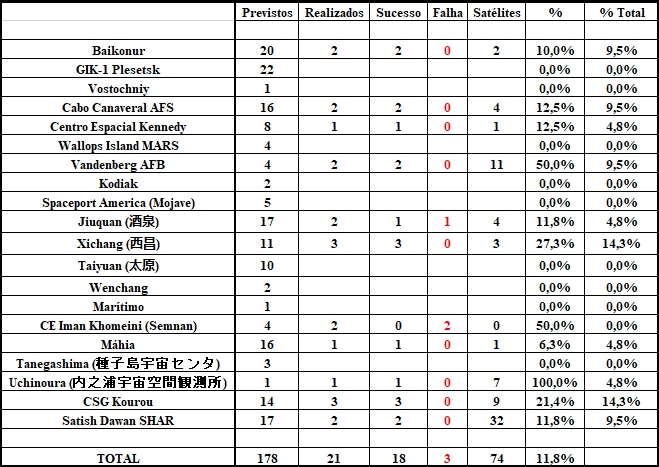
Os quadro seguinte mostra os lançamentos previstos e realizados em 2019 por polígono de lançamento.
Os próximos lançamentos orbitais previstos são (hora UTC):
5827 – 04 Abr (1101:35) – 14A14-1A Soyuz-2.1a (Ya15000-036) – Baikonur, LC31 PU-6 – Progress MS-11 (ISS-72P)
5828 – 04 Abr (1631:00) – 372RN21B Soyuz-ST-B/Fregat-MT (VS22) – O3b FM17, O3b FM18, O3b FM19, O3b FM20
5829 – 07 Abr (2236:00) – Falcon Heavy-02 (B1052.1, B1053.1, B1055.1) – CE Kennedy, LC-39A – Arabsat-6A
5830 – 17 Abr (2045:00) – Antares-230 – Cygnus NG-11 (CRS-11) ‘Roger Chaffee’, VCC-A (Aeternitas), VCC-B (Libertas), VCC-C (Ceres), Bird JPN (Uguisu), Bird LKA (Raavana 1), Bird NPL (NepaliSat 1), IOD-GEMS (IOD 1), EntrySat, Światowid, KrakSat, AeroCube-10A, AeroCube-10B, SASSI-2, NSLSat-1, ThinSat-1A, ThinSat-1B, ThinSat-1C, ThinSat-1D, ThinSat-1E, ThinSat-1F, ThinSat-1G, ThinSat-1H, ThinSat-1I, ThinSat-1J, ThinSat-1K, ThinSat-1L
5831 – 25 Abr (1015:00) – Falcon-9 (B1056.1) – Cabo Canaveral AFS, SLC-40 – Dragon SpX-17 (CRS-17)