

A Índia colocou em órbita o satélite de detecção remota Brasileiro, Amazonia-1. A Missão Amazonia irá fornecer imagens de detecção remota para observar e monitorizar o desmatamento especialmente na região amazónica e, também, a diversificada agricultura em todo o território do Brasil com uma alta taxa de revisitação, procurando actuar em sinergia com os programas ambientais existentes.
Colocado em órbita juntamente com outro 19 pequenos satélites, o lançamento do Amazonia-1 na missão PSLV-C51 da Organização de Investigação Espacial Indiana (ISRO – Indian Space Research Organization), teve lugar às 0454UTC do dia 28 de Fevereiro de 2021 e foi levada a cabo por um foguetão PSLV-DL a partir da Plataforma de Lançamento FLP (First Launch Pad) do Centro Espacial Satish Dawan SHAR, Ilha de Sriharikota.
Este foi o 78.º lançamento espacial desde o Centro Espacial Satish Dawan SHAR, sendo o 76.º lançamento orbital da Índia, e o 53.º lançamento de um foguetão PSLV, o 3.º lançamento de um foguetão PSLV-DL, e o 1.º lançamento orbital desde o Centro Espacial Satish Dawan SHAR em 2021.

Amazonia-1
A bordo da missão PSLV-C51 seguiu o satélite de detecção remota Amazonia-1 que é o primeiro satélite de observação da Terra completamente projectado, integrado, testado e operado pelo Brasil. O satélite tem uma massa de 637 kg e é baseado na Plataforma Multimissão (PMM).
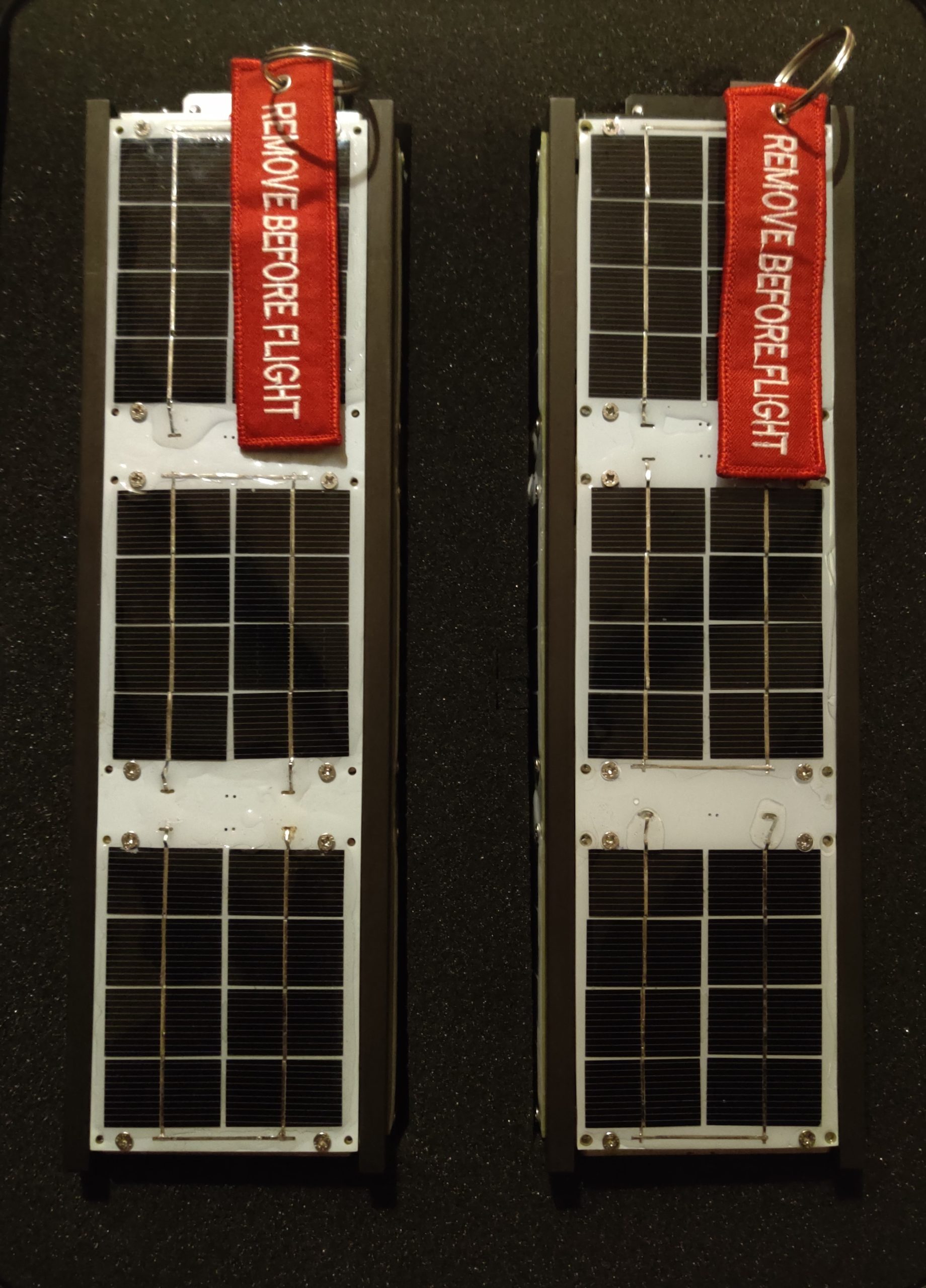
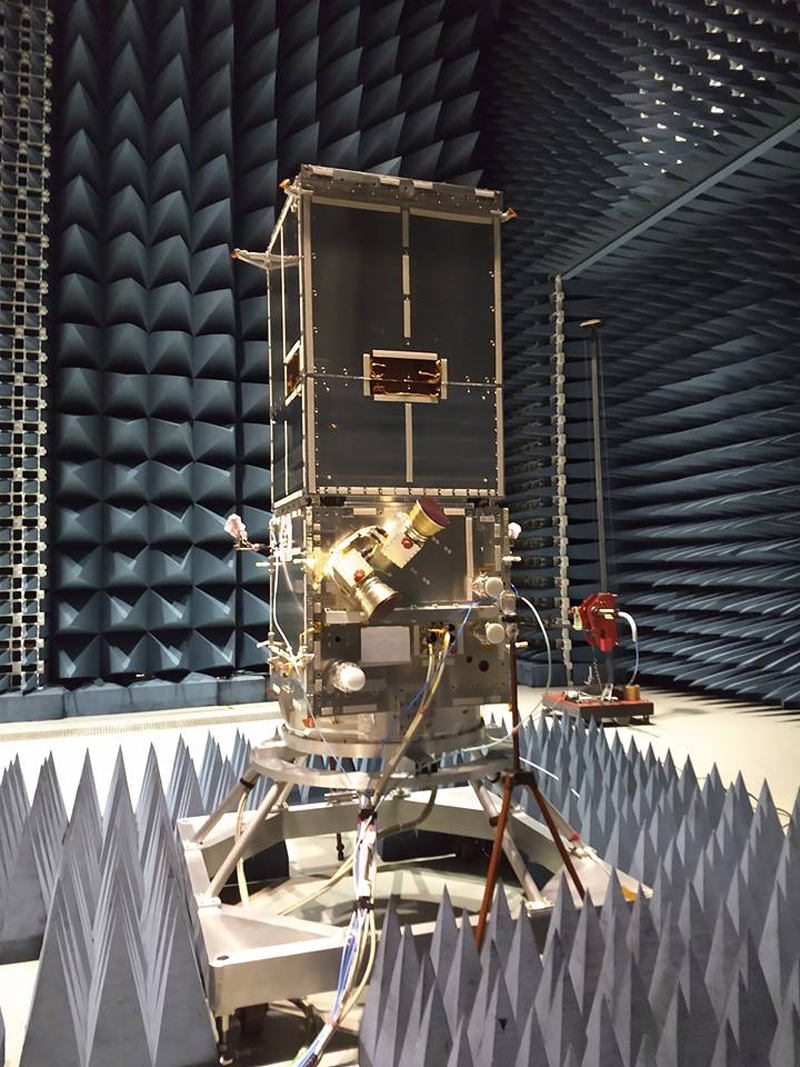 O satélite irá levar a cavo a validação da Plataforma Multimissão (PMM) como sistema, gerando fiabilidade e reduções significativas de prazos e custos para o desenvolvimento de futuras missões de satélites baseados nesta plataforma. Irá também permitir a consolidação do conhecimento do Brasil no ciclo completo de desenvolvimento de satélites estabilizados em 3 eixos, proporcionando o desenvolvimento da indústria Brasileira dos mecanismos de abertura de painéis solares, do desenvolvimento da propulsão do subsistema de controlo de atitude e órbita na indústria nacional (embora utilizando partes adquiridas no exterior) e permitir a consolidação de conhecimentos na campanha de lançamento de satélites de maior complexidade.
O satélite irá levar a cavo a validação da Plataforma Multimissão (PMM) como sistema, gerando fiabilidade e reduções significativas de prazos e custos para o desenvolvimento de futuras missões de satélites baseados nesta plataforma. Irá também permitir a consolidação do conhecimento do Brasil no ciclo completo de desenvolvimento de satélites estabilizados em 3 eixos, proporcionando o desenvolvimento da indústria Brasileira dos mecanismos de abertura de painéis solares, do desenvolvimento da propulsão do subsistema de controlo de atitude e órbita na indústria nacional (embora utilizando partes adquiridas no exterior) e permitir a consolidação de conhecimentos na campanha de lançamento de satélites de maior complexidade.
Os dados gerados pelo satélite serão úteis para atender, ainda, a outras aplicações correlacionadas, tais como: a monitorização da região costeira, reservatórios de água, florestas naturais e cultivadas, desastres ambientais, entre outros. Os dados estarão disponíveis tanto para a comunidade científica e órgãos governamentais, como para usuários interessados numa melhor compreensão do ambiente terrestre.
A Missão Amazonia, de forma global, prevê o desenvolvimento de três satélites de detecção remota: o Amazonia-1, Amazonia-1B e Amazonia-2.
Além dos objetivos finais associados ao fornecimento de dados para monitorização do meio ambiente, a Missão tem um importante objectivo do ponto de vista tecnológico: a validação da Plataforma Multimissão PMM como sistema, que é utilizada pela primeira vez no satélite Amazonia-1.

Por fim, a Missão Amazonia irá consolidar o conhecimento do Brasil no desenvolvimento integral de uma missão espacial utilizando satélites estabilizados em 3 eixos, visto que os satélites de detecção remota anteriores foram desenvolvidos em cooperação internacional com outros países. Essa competência global em engenharia de sistemas e em gestão de projectos coloca o Brasil num novo patamar científico e tecnológico para missões espaciais. A partir do lançamento do satélite Amazonia-1 e da validação em voo da PMM, o Brasil terá dominado o ciclo de vida de fabrico de sistemas espaciais para satélites estabilizados em três eixos. Isso significa autonomia para actuar em missões dessa categoria e a capacidade para avançar para outros tipos de missões, significando também a possibilidade de trabalhar em todas as etapas e em todos os subsistemas de uma missão dentro de parcerias nacionais. Assim, a indústria espacial Brasileira terá ganho herança de voo nos equipamentos fabricados para o satélite, o que abre perspectivas para fornecimento a outros países e agências espaciais.
O Amazonia-1 irá operar numa órbita sincronizada com o Sol, obtendo uma cobertura total do planeta a cada cinco dias. A bordo transporta um sistema de observação óptica de banda larga (câmara com três bandas de frequęncias no espectro visível e uma banda próxima do infravermelho) capaz de observar uma faixa de aproximadamente 850 km com 60 metros de resoluçăo. A sua foi projectada para proporcionar uma alta taxa de revisitação (cinco dias), tendo, com isso, capacidade de disponibilizar uma significativa quantidade de dados de um mesmo ponto do planeta. Esta característica é extremamente valiosa em aplicaçőes como alerta de desmatamento na Amazónia, pois aumenta a probabilidade de captura de imagens úteis diante da cobertura de nuvens na regiăo.
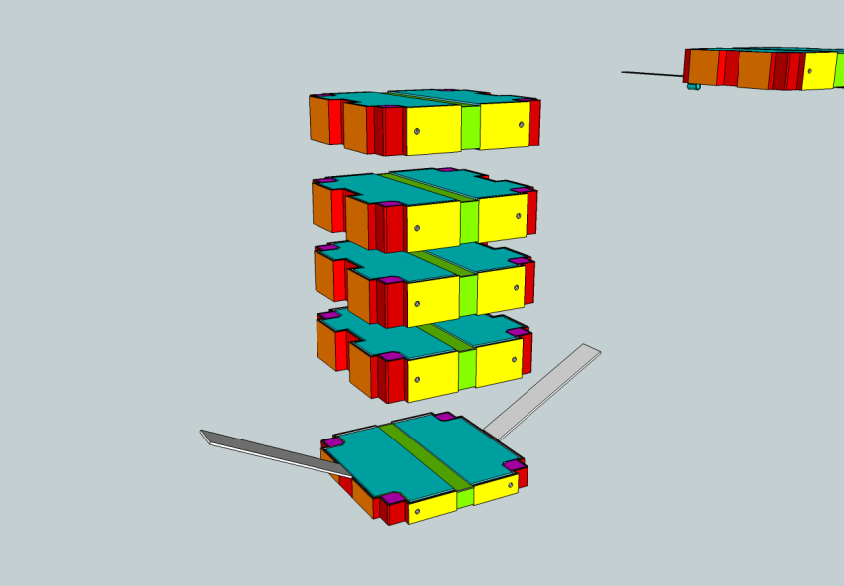
 Os satélites da série Amazonia serăo formados por dois módulos independentes: um Módulo de Serviço, que é a Plataforma Multimissăo (PMM), e um Módulo de Carga Útil, que abriga câmaras para observação, e equipamentos de gravaçăo e transmissăo de dados de imagens. A figura mostra o satélite Amazonia-1 com seus dois módulos acoplados: Plataforma Multimissăo (Módulo de Serviço, inferior) e o Módulo de Carga Útil (parte superior do satélite). Os painéis de cobertura estăo separados para ilustrar a disposiçăo interna dos equipamentos e subsistemas. O painel solar é mostrado na sua posiçăo recolhida (configuraçăo da fase de lançamento).
Os satélites da série Amazonia serăo formados por dois módulos independentes: um Módulo de Serviço, que é a Plataforma Multimissăo (PMM), e um Módulo de Carga Útil, que abriga câmaras para observação, e equipamentos de gravaçăo e transmissăo de dados de imagens. A figura mostra o satélite Amazonia-1 com seus dois módulos acoplados: Plataforma Multimissăo (Módulo de Serviço, inferior) e o Módulo de Carga Útil (parte superior do satélite). Os painéis de cobertura estăo separados para ilustrar a disposiçăo interna dos equipamentos e subsistemas. O painel solar é mostrado na sua posiçăo recolhida (configuraçăo da fase de lançamento).
Os outros satélites
Para além do Amazonia-1, a bordo da missão PSLV-C51 seguiram os satélites Satish Dhawan Sat (SDSAT), UNITYSat-1, UNITYSat-2, UNITYSat-3, Sindu Netra, SAI-1 NanoConnect-2, e SpaceBEE-76 a SpaceBEE-87.
 Satish Dhawan Sat (SDSAT)
Satish Dhawan Sat (SDSAT)
O Satish Dhawan Sat (SDSAT) foi construído pela Space Kidz India e é baseado no modelo CubeSat-3U. O satélite irá estudar a radiação espacial, a magnetosfera, e demonstrar os componentes de nanosatélite projectados e desenvolvidos localmente como parte da Iniciativa Hon’ble PM’s Vision – Aatmanirbhar Bharat. O satélite também irá testar as capacidades da tecnologia LoRa que poderão ser úteis em muitas futuras aplicações para comunicações a curta distância e M2M.
UNITYSat
A missão UNITYsat é uma combinação de três satélites projectados e construídos em conjunto pelo Instituto de Tecnologia Jeppiaar Institute of Technology, pelo Sriperumpudur (JITsat), pela Escola de Engenharia G. H. Raisoni, Nagpur (GHRCEsat) e pelo Instituto de Engenharia e Tecnologia Sri Shakthi, Coimbatore (Sri Shakthi Sat).
 Os satélites (CubeSat-0.25) têm dimensões de 10,0 x 10,0 x 2,5 cm. Todos os UNITYsat são ligados como um único satélite no factor 1U, 2U ou 3U, e são transportados num dispositivo lançador POD, colocados em órbita como um único satélite que depois se divide em pequenos UNITYsats após um certo período de tempo.
Os satélites (CubeSat-0.25) têm dimensões de 10,0 x 10,0 x 2,5 cm. Todos os UNITYsat são ligados como um único satélite no factor 1U, 2U ou 3U, e são transportados num dispositivo lançador POD, colocados em órbita como um único satélite que depois se divide em pequenos UNITYsats após um certo período de tempo.
Os satélites serão utilizados para serviços de transmissão de rádio.
Sundhu Netra
O satélite Sindhu Netra tem uma massa de cerca de 10 kg e é um satélite Indiano para a monitorização de sinais marítimos AIS. Foi construído por estudantes e financiado pela Defence Research and Development Organisation (DRDO).
SAI-1 Nanoconnect-2
O SAI-1 Nanoconnect-2 é um CubeSat-3U que transporta uma carga desenvolvida pelo Laboratório de Instrumentação Espacial (Space Instrumentation Laboratory – LINX) da Universidade Nacional de Mexico (UNAM) para validar a utilização da rede de telefone GlobalStar como um canal secindário para nanosatélites.
Os satélites SpaceBEE
A missão Transporter-1 colocou em órbita 24 picossatélites SpaceBEE. Anteriormente conhecidos por BEE (Basic Electronic Elements), os pequenos satélites são construídos sob a forma CubeSat-0.25 e servem para demonstrar comunicações  bidirecionais de dados por satélite para a Swarm Technologies Inc..
bidirecionais de dados por satélite para a Swarm Technologies Inc..
A constelação final será composta por 150 satélites, sendo fabricados um total de 170 unidades.
Estes satélites usam banda VHF para comunicar entre si. Será também implantada uma base terrestre para operar estes satélites. Estima-se que esta missão começará a ser operada logo após o lançamento. Esta missão durará entre 6 meses a 2 anos.
A missão PSLV-C51
O lançamento da missão PSLV-C51 estava originalmente previsto para ter lugar a 22 de Fevereiro, sendo adiado (a 14 de Janeiro) para o dia 28.
A missão iniciou-se com a ignição do primeiro estágio a T=0s. Equipado com dois propulsores laterais de combustível sólido, estes entram em ignição a T+0,42s, separando-se a T+1m 10s.
O primeiro estágio PS1 separa-se a T+1m 49s, viajando a uma velocidade inercial de 1,82 km/s). A ignição do segundo estágio ocorre de imediato. A separação das duas metades da carenagem de protecção ocorre a T+2m 42s com o veículo a viajar a uma velocidade de 2,21 km/s.


O final da queima e separação do segundo estágio PS2 ocorre a T+4m 22s e a ignição do terceiro estágio PS3 ocorre a T+4m 23s a uma velocidade de 3,82 km/s. O final da queima e separação do terceiro estágio ocorre a T+8m 15s, a uma velocidade de 5,57 km/s.
A primeira ignição do quarto estágio PS4 inicia-se a T+8m 25s e termina a T+16m 36s. O conjunto encontra-se a viajar a uma velocidade de 7,47 km/s.
A separação do satélite Amazonia-1 ocorre a T+17m 23s. A segunda ignição do quarto estágio PS4 inicia-se a T+1h 1m 10s e termina a T+1h 1m 19s. O conjunto encontra-se a viajar a uma velocidade de 7,42 km/s. A terceira ignição do quarto estágio PS4 inicia-se a T+1h 49m 52s e termina a T+1h 50m 0s. O conjunto encontra-se a viajar a uma velocidade de 7,61 km/s.
Os restantes satélites separam-se entre T+1h 51m 32s e T+1h 55m 7s.
O foguetão PSLV
 Na missão PSLV-C51 foi utilizada a versão PSLV-DL.
Na missão PSLV-C51 foi utilizada a versão PSLV-DL.
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
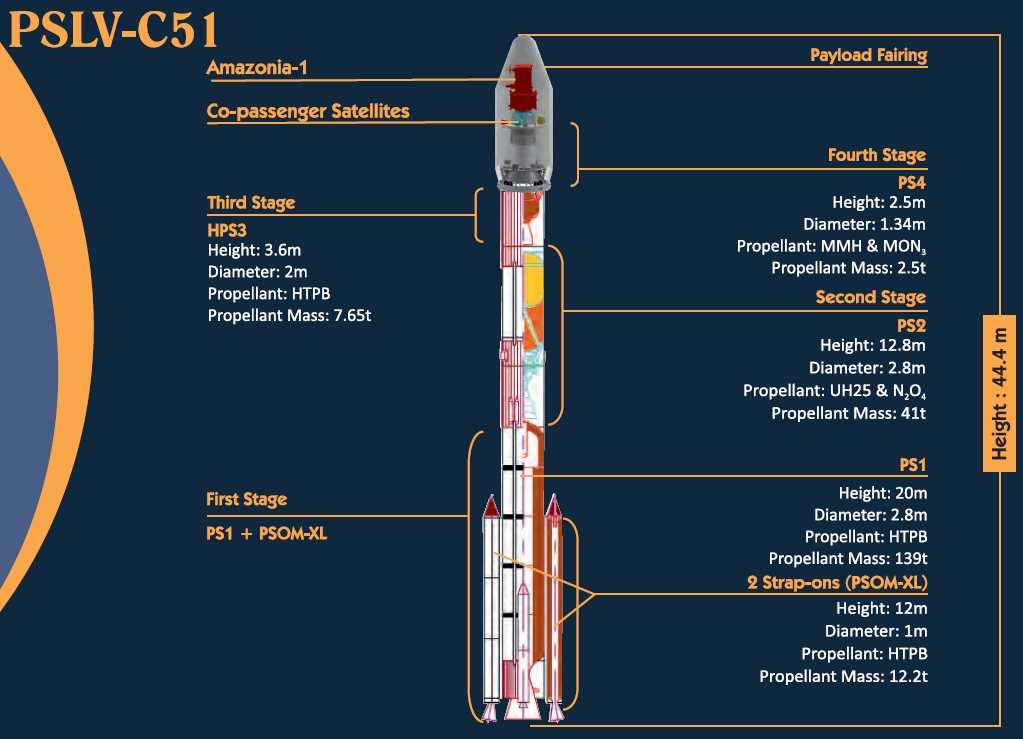
De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5.º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.

O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.

O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios: no 1.º Estágio, o sistema SITVC (Secondary Injection Thrust Vector Control) é utilizado para controlo de translação, além de motores de reacção para controlo da rotação; no 2.º Estágio é feita a movimentação do motor para controlo de translação e motor de controlo da rotação;
no 3.º Estágio é utilizado um escape (tubeira) flexível para controlo de translação e um sistema de controlo de reacção PS-4 para controlo da rotação; no 4.º Estágio é feita a movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.
Por seu lado, a versão PSLV-DL utiliza os estágios standard auxiliados por apenas dois propulsores laterais de combustível sólido, enquanto que a versão PSLV-QL utiliza os estágios standard auxiliados por quatro propulsores laterais de combustível sólido.
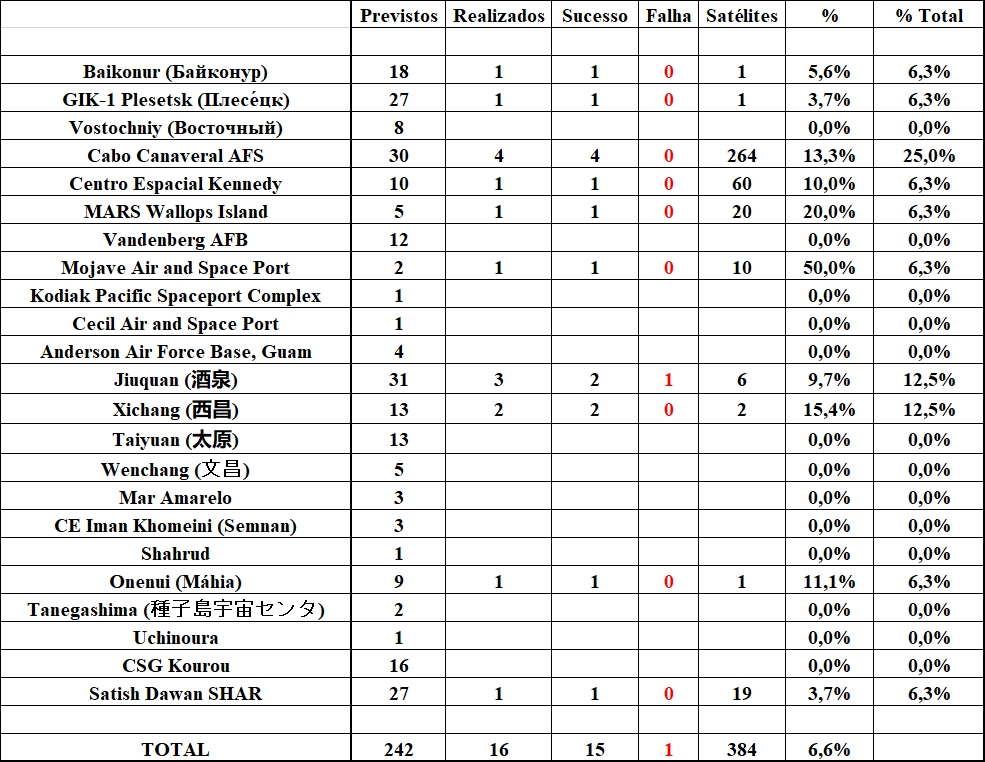
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 6037
– Lançamento orbital Índia: 77 (1,28%)
– Lançamento orbital desde Satish Dawan SHAR: 77 (1,28% – 100,00%)
Os próximos lançamentos orbitais previstos são (hora UTC):
6038 – 28 Fev (0700:??) – 14A14-1B Soyuz-2.1b/Fregat (R15000-032/122-07) – Baikonur, LC31 PU-6 – Arktika-M1
6039 – 01 Mar (0137:??) – Falcon 9 (B1049.8) – CE Kennedy, LC-39A – Starlink-F18 (x60) [v1.0 L19]
6040 – 08 Mar (0341:??) – Falcon 9 (B1058.6) – Cabo Canaveral SFS, SLC-40 – Starlink-F21 (x60) [v1.0 L20]
6041 – 12 Mar (1000:??) – Chang Zheng-7A (Y2) – Wenchang, LC201 – Xinjishu Yanzheng-6 (02)
6042 – 20 Mar (2300:??) – Electron/Photon Pathstone (F19 “They Go Up So Fast”) – Onenui (Máhia), LC-1A – BlackSky Global-9, Centauri-3, Myriota-7, RAAF-M2 A, RAAF-M2 B, Gunsmoke-J (Jacob’s Ladder), Veery Hatchling, Pathstone