

Um novo satélite de detecção remota foi colocado em órbita pela Organização de Investigação Espacial Indiana (ISRO – Indian Space Research Organization) juntamente com mais sete satélites.
O lançamento da missão PSLV-C48 teve lugar às 0955UTC do dia 11 de Dezembro de 2017 e foi levada a cabo por um foguetão PSLV-QL a partir da Plataforma de Lançamento FLP (First Launch Pad) do Centro Espacial Satish Dawan SHAR, Ilha de Sriharikota.
A missão teve uma duração de cerca de 22 minutos e todos os satélites foram colocados nas órbitas previstas. Este foi o 75.º lançamento espacial desde o Centro Espacial Satish Dawan SHAR, sendo o 73.º lançamento orbital da Índia, e o 50.º lançamento de um foguetão PSLV, o 2.º lançamento de um foguetão PSLV-QL, e o 6.º lançamento orbital desde o Centro Espacial Satish Dawan SHAR em 2019.

A carga da missão PSLV-C48
A bordo da missão PSLV-C48 seguiam os satélites RISAT-2BR1, como carga principal, e os satélites QPS-SAR 1 (Izanagi), 1HOPSat TD, Lemur-2 x1 a Lemur-2 x4, Duchifat-3, Tyvak 0129 e Tyvak 0092.
Os satélites da série RISAT-2B usam um sistema de observação SAR (Synthetic Aperture Radar) activo para fornecer a continuidade deste tipo serviço iniciado pelo satélite RISAT-2. O objectivo da missão é usar a capacidade de observação SAR durante 24 horas em todas as condições meteorológicas em aplicações como agricultura, silvicultura, humidade do solo, geologia, gelo marinho, monitorização costeira, identificação de objectos e monitorização de inundações, além de ser empregue e, vigilância militar.
O RISAT-2BR1 tinha uma massa de 628 kg e está equipado com um radar SAR a operar em banda X. O seu tempo de vida útil em órbita será de 5 anos.
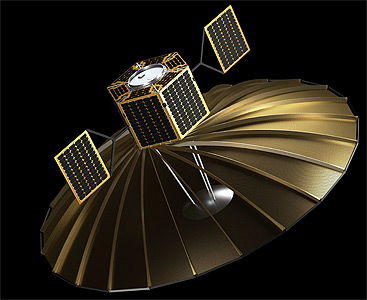 O satélite QPS-SAR 1 (Izanagi) é o primeiro de dois pequenos satélites SAR para a observação da Terra desenvolvido e operado pelo Instituto QPS do Japão, sendo percursores de uma constelação de 36 satélites. Têm uma massa de cerca de 100 kg e estão equipados com uma antena com um diâmetro de 3,6 metros. São capazes de diferenciar objectos com 1 metro de comprimento e identificar veículos automóveis.
O satélite QPS-SAR 1 (Izanagi) é o primeiro de dois pequenos satélites SAR para a observação da Terra desenvolvido e operado pelo Instituto QPS do Japão, sendo percursores de uma constelação de 36 satélites. Têm uma massa de cerca de 100 kg e estão equipados com uma antena com um diâmetro de 3,6 metros. São capazes de diferenciar objectos com 1 metro de comprimento e identificar veículos automóveis.
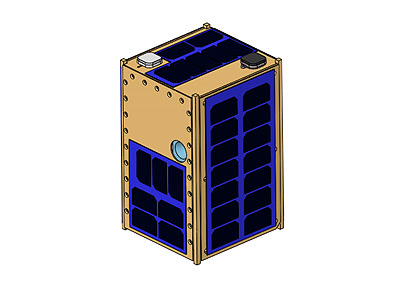
O CubeSat-12U, 1HOPSAT TD (1st-generation High Optical Performance Satellite Technical Demonstrator), é um protótipo de uma constelação de satélites de observação da Terra da Hera Systems. A sua missão é de 6 meses e tem uma massa de 22 kg, estando equipado com um sistema telescópico de observação.
O satélite testará sistemas para a constelação operacional inicial de oito satélites 1HOPSat. Contém uma carga útil composta por um telescópio para gravar imagens e vídeos de regiões da Terra especificadas pelos clientes, obtendo uma resolução de 1 metro. As imagens obtidas serão transmitidas para a Terra através de estações terrestres por um único link de rádio OQPSK em banda X. O comando e a telemetria serão implementados através de um sistema de rádio experimental em banda C usando a tecnologia 802.11n (OFDM). O comando e a telemetria são complementados com um rádio Iridium Short Burst Data (SBD), que fornece dados de baixa rendimento.
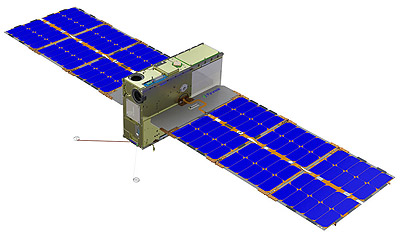
Os satélites Lemur-2 são baseados no modelo CubeSat-3U e têm uma massa de 4 kg. Os satélites constituem a constelação inicial em órbita terrestre baixa construídos pela Spire, transportando duas cargas para meteorologia e seguimento do tráfego marítimo (a carga STRATOS – ocultação do sinal rádio de GPS – e a carga AIS SENSE, respectivamente). A STRATOS permite a detecção do sinal GPS que é afectado quando passa através da atmosfera  terrestre. Posteriormente, e utilizando um processo designado ‘ocultação do sinal GPS’, o satélite mede a alteração do sinal GPS para calcular os perfis precisos para a temperatura, pressão e humidade na Terra. A partir do 78.º Lemur-2, estes satélites transportam também a carga AirSafe ASD-B para seguimento de aviões.
terrestre. Posteriormente, e utilizando um processo designado ‘ocultação do sinal GPS’, o satélite mede a alteração do sinal GPS para calcular os perfis precisos para a temperatura, pressão e humidade na Terra. A partir do 78.º Lemur-2, estes satélites transportam também a carga AirSafe ASD-B para seguimento de aviões.
Nesta missão foram lançados o Lemur-2 (108) a Lemur-2 (111).
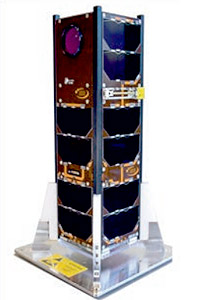
Desenvolvido pelo Laboratório Espacial do Centro de Ciência de Herzliya, Israel, o Duchifat-3 é um CubeSat-3U que será utilizado para observação da Terra e para rádio-amadorismo. O satélite foi desenvolvido e construído por estudantes de escolas secundárias e tem como principais objectivos o desenvolvimento de um satélite educacional por parte de estudantes das escolas secundárias, a operação de uma câmara a bordo para observação da Terra, e a operação de um sistema de rádio-amador e APRS.
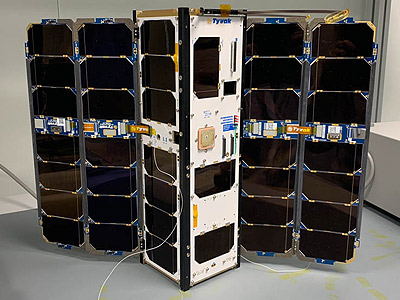
O satélite PTD-1 (Pathfinder Technology Demonstrator), ou Tyvak 0129, é um CubeSat-6U para demonstração tecnológica que irá testar o funcionamento de vários novos subsistemas para CubeSats, fornecendo assim melhorias significativas para estes pequenos satélites. O satélite foi desenvolvido e será operado pelo Centro de Investigação NASA Ames da NASA e pela Tyvak Nano-Satellite Systems, Inc. Tem uma massa de cerca de 11 kg e as suas dimensões são 30 cm × 25 cm × 10 cm.
O principal objectivo da missão é o de qualificar em voo e caracterizar um novo micro electro-motor desenvolvido pela Busek Space Propulsion and Systems.
O COMMTRAIL, ou Tyvak 0092, é um CubeSat-3U para demonstrar capacidades de busca e salvamento. Foi desenvolvido pela Tyvak Nano-Satellite Systems, Inc.
O COMMTRAIL é um veículo de demonstração e validação de comunicação máquina a máquina, projectado para captar sinais dos terminais de Terra e fazer o downlink para outras estações. A sua carga útil é um rádio definido por software UHF (SDR) equipado com uma antena helicoidal personalizada e extensível.
Lançamento
O objectivo desta missão era a injecção orbital do satélite RISAT-2BR1 numa órbita com uma altitude média de 576 km e inclinação orbital de 37.º. O azimute de voo foi de 140.º.
O lançamento da missão PSLV-C48 iniciou-se com a ignição do primeiro estágio a T=0s. Equipado com quatro propulsores laterais de combustível sólido, os PSOM XL 1 e 2 entram em ignição a T+0,42s, seguindo-se a ignição dos PSOM XL 3 e 4 a T+0,62s.


A separação dos propulsores PSOM XL 1 e 2 ocorre a T+1m 9,9s, seguindo-se a separação dos PSOM XL 3 e 4 a T+1m 10,1s.
O primeiro estágio PS1 separa-se a T+2m 51,18s a uma altitude de 66,04 km (viajando a uma velocidade inercial de 2,06 km/s). A ignição do segundo estágio ocorre quase de imediato (T+2m 51,38s).
A separação das duas metades da carenagem de protecção ocorre a T+2m 40,08s a uma altitude de 115,22 km e com o veículo a viajar a uma velocidade de 2,53 km/s.
O final da queima e separação do segundo estágio PS2 ocorre a T+4m 23,12s e a ignição do terceiro estágio PS3 ocorre a T+4m 24,32s a uma altitude de 218,67 km e a uma velocidade de 4,86 km/s. O final da queima e separação do terceiro estágio ocorre a T+9m 59,22s, a uma altitude de 463,48 km e a uma velocidade de 7,34 km/s.
A ignição do quarto estágio PS4 inicia-se a T+10m 9,62s e termina a T+15m 24,50s. O conjunto encontra-se a uma altitude de 577,92 km e a viajar a uma velocidade de 7,57 km/s.
A separação do satélite RISAT-2BR1 ocorre a T+16m 26,50s, enquanto que a separação dos restantes satélites decorre de forma sequencial entre T+17m 26,50s e T+21m 19,50s.

O foguetão PSLV
Na missão PSLV-C48 foi utilizada a versão PSLV-QL.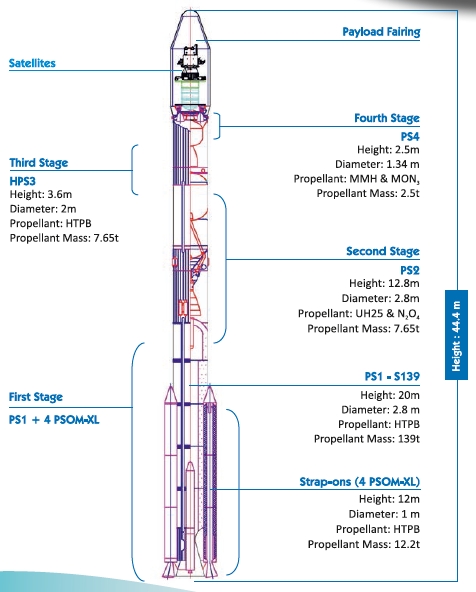
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5.º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.

O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.

O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios: no 1.º Estágio, o sistema SITVC (Secondary Injection Thrust Vector Control) é utilizado para controlo de translação, além de motores de reacção para controlo da rotação; no 2.º Estágio é feita a movimentação do motor para controlo de translação e motor de controlo da rotação;
no 3.º Estágio é utilizado um escape (tubeira) flexível para controlo de translação e um sistema de controlo de reacção PS-4 para controlo da rotação; no 4.º Estágio é feita a movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.
Por seu lado, a versão PSLV-DL utiliza os estágios standard auxiliados por apenas dois propulsores laterais de combustível sólido, enquanto que a versão PSLV-QL utiliza os estágios standard auxiliados por quatro propulsores laterais de combustível sólido.
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5899
– Lançamento orbital Índia: 74 (1,25%)
– Lançamento orbital desde Satish Dawan SHAR: 74 (1,25% – 100,00%)
Os quadro seguinte mostra os lançamentos previstos e realizados em 2019 por polígono de lançamento.

Os próximos lançamentos orbitais previstos são (hora UTC):
5900 – 16 Dez (0730:04) – CZ-3B Chang Zheng-3BGZ/YZ-1 (Y67/Y15) – Xichang, LC3 – Beidou-3M19 (Beidou-52), Beidou-3M20 (Beidou-53)
5901 – 17 Dez (0010:??) – Falcon 9-078 – CE Kennedy, LC-39A – Kacific-1 (JCSat-18)
5902 – 17 Dez (0854:20) – 372RN21A Soyuz-ST-A/Fregat-M (VS23/R15000-008/133-12) – CSG Kourou (Sinnamary), ELS – CSG-1, CHEOPS, ANGELS, EyeSat, OPS-SAT
5903 – 20 Dez (0321:XX) – CZ-4B Chang Zheng-4B (Y44) – Taiyuan, LC9 – CBERS-4 (Ziyuan-1 04A), ETRSS-1, FloripaSat, MN50-01, MN10-03, MN10-04
5904 – 20 Dez (1136:00) – Atlas-V/N22 (AV-080) – Cabo Canaveral AFS, SLC-41 – Starliner-F1 (Boe-OFT)