

A organização de investigação espacial Indiana, ISRO, levou a cabo um lançamento orbital recorde ao colocar em órbita 104 satélites num único lançamento. Tendo como carga principal o satélite de detecção remota CartoSat-2D, o lançamento do foguetão PSLV-C37 teve lugar ás 0358UTC do dia 15 de Fevereiro de 2017 a partir da Plataforma de Lançamento FLP (First Launch Pad) do Centro Espacial Satish Dawan SHAR, localizado na Ilha de Sriharikota.
Para além do CartoSat-2D seguiam a bordo do PSLV-XL os pequenos satélites INS-1A, INS-1B, BGUSat, DIDO-2, PEASSS, Al-Farabi-1, Nayif-1 (FUNcube-5), 88 satélites Flock-3p e 8 satélites Lemur-2, perfazendo uma carga total de 1.378 kg.
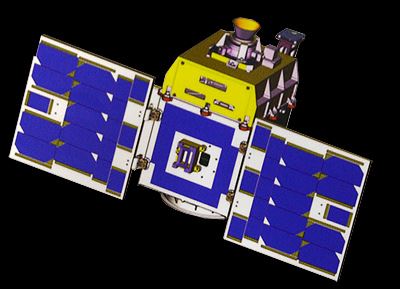
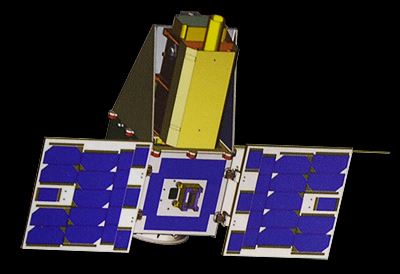
O CartoSat-2D é a carga principal desta missão. Este satélite é similar aos quatro satélites anteriores da série CartoSat. Após a sua colocação na órbita polar sincronizada com o Sol a uma altitude de 505 km, o satélite será colocado na sua configuração operacional após o que começará a fornecer serviços de detecção remota utilizando as suas câmaras pancromáticas e multiespectrais.

As imagens enviadas pelo satélite serão úteis para aplicações cartográficas, aplicações rurais e urbanas, regulação e utilização dos terrenos costeiros, monitorização da rede viária, distribuição da água, criação de mapas de utilização do solo, e aplicações para os sistemas Land Information System (LIS) e Geographical Information System (GIS).
O CartoSat-2D tinha uma massa de 714 kg no lançamento e a sua vida operacional em órbita deverá ser de 5 anos.

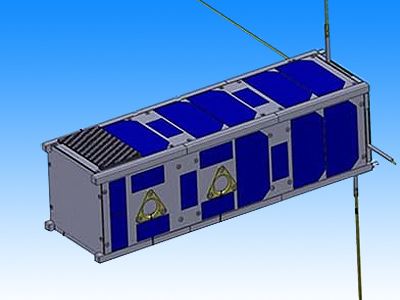
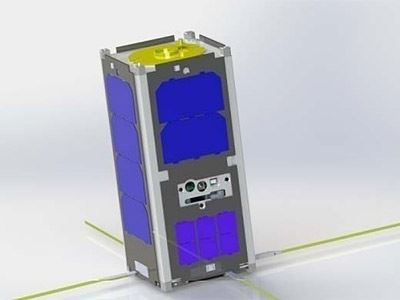
Os satélites INS-1A e INS-1B (ISRO Nano Satellite) são baseados no versátil sistema de nano-satélite que foi desenvolvido para cargas científicas e experimentais. O sistema INS foi desenvolvido como co-passageiro para acompanhar satélites de maiores dimensões nos foguetões PSLV.
Os principais objectivos do sistema INS são o desenho e desenvolvimento de um satélite modular de baixo custo com uma massa na ordem dos 10 kg e capaz de transportar cargas até 5 kg; proporcionar uma oportunidade para a demonstração de cargas tecnológicas; fornecer um modelo standard para a demanda de serviços e lançamentos; e proporcionar uma oportunidade para o transporte de cargas para universidades e de investigação e desenvolvimento.
O satélite INS-1A tem uma massa de 8,4 kg e transporta duas cargas: o radiómetro Surface BRDF Radiometer (SBR) para medir a função Bidirectional Reflectance Distribution Function (BRDF) da superfície terrestre e que irá fazer medições da reflectância de diferentes características da superfície tendo em conta o albedo solar; e o Single Event Upset Monitor (SEUM) para monitorizar eventos eléctricos em componentes electrónicos COTS (Commercial Off-The-Shelf).
O satélite INS-1B tem uma massa de 9,7 kg transportando o Earth Exosphere Lyman Alpha Analyser (EELA) e a Origami Camera.
Os satélites Flock-3p são nano-satélites parte de uma frota de satélites de detecção remota que têm como função observar o planeta Terra de forma contínua para propósitos comerciais, ambientais e humanitários. Os satélites são projectados, construídos e operados pela Planet Inc., São Francisco – EUA. Têm por base o modelo CubeSat-3U e a sua massa é de 5 kg.

Os satélites Lemur-2 são nano-satélites operados pela Spire Global Inc., São Francisco – EUA, e têm como objectivo fornecer serviços de seguimento de embarcações utilizando o sistema Automatic Identification System (AIS), além de levar a cabo medições meteorológicas utilizando a ocultação das ondas de rádio do sistema GPS. São baseados na plataforma CubeSat-3U e a sua massa é de 4 kg.
Os satélites colocados em órbita são o Lemur-2 (22) (Lemur-2 Jobanputra), Lemur-2 (23) (Lemur-2 Spire-Minions), Lemur-2 (24) (Lemur-2 Satchmo), Lemur-2 (25) (Lemur-2 Rdeaton), Lemur-2 (26) (Lemur-2 Smita-Sharad), Lemur-2 (27) (Lemur-2 Mia-Grace), Lemur-2 (28) (Lemur-2 Noguescorreig) e Lemur-2 (29) (Lemur-2 Tachikoma)

O satélite BGUSat (Ben Gurion University Satellite) é um CubeSat-3U desenvolvido pela Universidade Ben Gurion, Israel. Tendo uma massa de 4 kg, o satélite transporta uma câmara CCD, um sensor inercial triaxial, um sensor espacial GPS experimental para a Honeywell, um magnetómetro, um sensor de comunicação óptica e outras cargas.

Desenvolvido e operado pela empresa SpacePharma de Israel e da Suíça, o satélite DIDO-2, também designado Chen Jiayong-1 (陈家镛一号), transporta um pequeno laboratório mGnify que pode ser controlado remotamente de qualquer local do globo terrestre. Este laboratório pode levar a cabo experiências relacionadas com o crescimento de bactérias, resistência dos antibióticos, reacções enzimáticas, polimerização, síntese de nano-partículas, dinâmica de agregação de partículas, estabilidade da emulsão e cristalização. O satélite é baseado no modelo CubeSat-3U e tem uma massa de 4 kg.

Baseado no modelo CubeSat-3U, o satélite PEASSS (Piezo Electric Assisted Smart Satellite Structure) foi construído por um consórcio multinacional, sendo desenvolvido como parte do projecto FP7 da Comissão Europeia envolvendo as empresas Active Space Technologies GmbH (Alemanha), TNO e ISIS (Holanda), SONACA (Bélgica), e Technion e NSL (Israel). O objectivo da missão é o desenvolvimento, fabrico, teste e qualificação de ‘estruturas inteligentes’ que combinam painéis compósitos, materiais piezoeléctricos e sensores da próxima geração, como objectivo de se desenvolver uma melhor precisão de orientação autónoma e geração de energia no espaço. Os componentes do sistema incluem novos sistemas electrónicos para nano-satélites, um sistema de energia piezo, uma estrutura piezo inteligente e um sensor de fibra óptica, e um sistema de controlo. O PEASSS tem uma massa de 4 kg.
O pequeno Al-Farabi-1 é um Cubesat-2U com uma massa de 2 kg. O satélite foi desenvolvido pela Universidade Al-Farabi, Cazaquistão. Equipado com uma câmara CMOS de 3MPixels, o satélite foi desenvolvido como uma missão educacional, tendo como missão secundária a utilização de um uplink/downlink e o teste de algoritmos ADCS.
O satélite Nayif-1 (FUNcube-5) é um Cubesat-1U com uma massa de 1 kg. O satélite foi desenvolvido pela Emirates Institution for Advanced Science and Technology (EIAST), em colaboração com a American University of Sharjah (AUS). Este é um satélite educacional e de demonstração tecnológica.
Lançamento
A ignição do primeiro estágio ocorre a T=0s com os propulsores laterais de combustível sólido a entrarem em ignição aos pares e de forma sequencial: os propulsores 1 e 2 entram em ignição a T+0,42s, os propulsores 3 e 4 a T+0,62s e os propulsores 5 e 6 a T+25,0s, com o veículo já em voo e após deixar a plataforma de lançamento.
A separação dos propulsores 1 e 2 ocorre a T+1m 9,90s, seguindo-se a separação dos propulsores 3 e 4 a T+1m 10,10s e finalmente a separação dos propulsores 5 e 6 a T+1m 32,00s. O lançador continua a ascensão propulsionado pelo primeiro estágio até T+1m 50,88s, altura em que este se separa. A ignição do segundo estágio ocorre a T+1m 51,08s.
A separação da carenagem de protecção ocorre a T+2m 38,28s, pois é agora desnecessária e representa um peso extra para o lançador, sendo assim descartada. A separação é sequencial com a quebra pirotécnica das ligações entre as duas metades da carenagem de protecção e de seguida, pela actuação de molas, a carenagem separa-se do veículo.
Terminada a queima do segundo estágio, este separa-se a T+4m 22,92s, com a ignição do terceiro estágio a ocorrer a T+4m 24,12s. Finalizada a queima do terceiro estágio, este separa-se a T+8m 12,22s, entrando num voo balístico até à ignição do quarto estágio a T+8m 22,22s. Este termina a sua queima a T+16m 47,80s, a uma altitude de 509,54 km e a uma velocidade de 7,61 km/s.
A separação do satélite CartoSat-2D ocorre a T+17m 29,80s, seguindo-se o satélite INS-1A a T+17m 39,80s e osatélite INS-1B a T+17m 40,30s. A separação do primeiro par de nano-satélites ocorre a T+18m 32,80s e o último par separa-se a T+28m 42,80s.
O foguetão PSLV
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
O quadro mostra as características do PSLV-C37 (massa no lançamento: 321.000 kg, altura: 44,4 metros).

O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.

O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios:
• 1º Estágio: sistema SITVC (Secondary Injection Thrust Vector Control) para controlo de translação, e motores de reacção para controlo da rotação;
• 2º Estágio: movimentação do motor para controlo de translação e motor de controlo da rotação;
• 3º Estágio: escape (tubeira) flexível para controlo de translação e sistema de controlo de reacção PS-4 para controlo da rotação;
• 4º Estágio: movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.
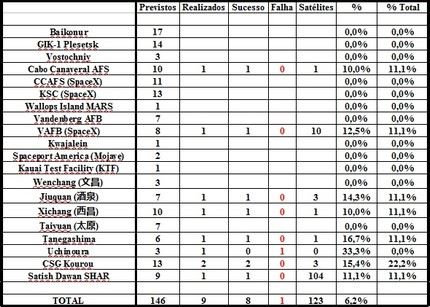
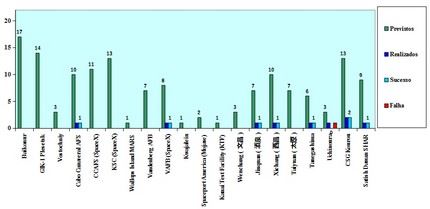
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5607
– Lançamento orbital com sucesso: 5252
– Lançamento orbital Índia: 57
– Lançamento orbital Índia com sucesso: 50
– Lançamento orbital desde Satish Dawan SHAR: 57
– Lançamento orbital desde Satish Dawan SHAR com sucesso: 50
Ao se referir a ‘lançamentos com sucesso’ significa um lançamento no qual algo atingiu a órbita terrestre, o que por si só pode não implicar o sucesso do lançamento ou da missão em causa.
Dos lançamentos bem sucedidos levados a cabo em 2017: 12,5% foram realizados pelos Estados Unidos (incluindo ULA – 100,0% (1) e Orbital ATK – 0,0%); 25,0% (2) pela China; 0,0% pela Rússia; 25,0% (2) pela Arianespace; 12,5% (1) pela Índia; 12,5% (1) pelo Japão e 12,5% (1) pela SpaceX.
Os próximos lançamentos orbitais previstos são (hora UTC):
18 Fev (1501:00) – Falcon-9 (032) – Centro Espacial Kennedy, LC-39A – Dragon SpX-10 (CRS-10)
22 Fev (0558:33) – 11A511U Soyuz-U (Т15000-145) – Baikonur, LC1 PU-5 – Progress MS-05
28 Fev (0551:00) – Falcon-9 (032) – Centro Espacial Kennedy, LC-39A – EchoStar-23
28 Fev (??:??:??) – KT-2A Kaituozhe-2A – Jiuquan – TK-1 Tiankong-1
1 Mar (??:??:??) – Atlas-V/401 (AV-068) – Vandenberg AFB, SLC-3E – NROL-79 (Intruder-8A / NOSS 3-8A; Intruder-8B / NOSS 3-8B)