

A organização espacial Indiana, ISRO (Indian Space Research Organization) colocou em órbita o satélite Cartosat-2C após o lançamento bem sucedido do foguetão PSLV-C34 (PSLV-XL). Juntamente com o Cartosat-2C foram colocados em órbita mais vinte pequenos satélites.
O lançamento teve lugar às 03:56UTC do dia 22 de Junho de 2016 a partir da Plataforma de Lançamento SLP (Second Launch Pad) do Centro Espacial Satish Dawan SHAR, Ilha de Sriharikota.
Todas as fases do lançamento decorreram como previsto e os satélites foram colocados nas respectivas órbitas.
Lançamento
A ignição do primeiro estágio ocorre a T=0s com os propulsores laterais de combustível sólido a entrarem em ignição aos pares e de forma sequencial: os propulsores 1 e 2 entram em ignição a T+0,42s, os propulsores 3 e 4 a T+0,62s e os propulsores 5 e 6 a T+25,0s, com o veículo já em voo e após deixar a plataforma de lançamento.
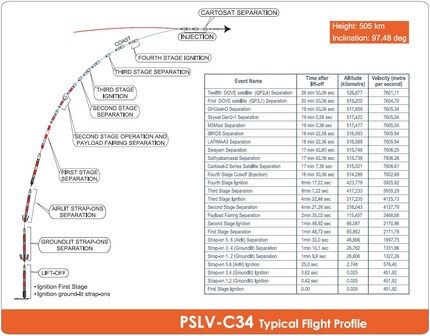 A separação dos propulsores 1 e 2 ocorre a T+1m 9,9s, seguindo-se a separação dos propulsores 3 e 4 a T+1m 10,1s e finalmente a separação dos propulsores 5 e 6 a T+1m 32,0s. O lançador continua a ascensão propulsionado pelo primeiro estágio até T+1m 48,72s, altura em que este se separa. A ignição do segundo estágio ocorre a T+1m 48,92s.
A separação dos propulsores 1 e 2 ocorre a T+1m 9,9s, seguindo-se a separação dos propulsores 3 e 4 a T+1m 10,1s e finalmente a separação dos propulsores 5 e 6 a T+1m 32,0s. O lançador continua a ascensão propulsionado pelo primeiro estágio até T+1m 48,72s, altura em que este se separa. A ignição do segundo estágio ocorre a T+1m 48,92s.
A separação da carenagem de protecção ocorre a T+2m 35,02s, pois é agora desnecessária e representa um peso extra para o lançador, sendo assim descartada. A separação é sequencial com a quebra pirotécnica das ligações entre as duas metades da carenagem de protecção e de seguida, pela actuação de molas, a carenagem separa-se do veículo.
Terminada a queima do segundo estágio, este separa-se a T+4m 21,26s, com a ignição do terceiro estágio a ocorrer 1,2 segundos depois. O terceiro estágio termina a sua queima a T+8m 7,22s, entrando num voo balístico de cerca de 10 segundos até à ignição do quarto estágio a T+8m 17,22s. Este termina a sua queima a T+16m 30,36s e a uma altitude de 514,29 km.
A separação do satélite Cartosat-2C ocorre a T+17m 7,36s, com o satélite SathyaBamaSat a separar-se a T+17m 42,36s. O satélite Swayam separa-se a T+17m 42,80s, enquanto que o satélite LAPAN-A3 separa-se a T+18m 22,36s, seguindo-se o satélite BIROS a T+18m 22,58s e o satélite M3MSat a T+19m 0,36s. O satélite SkySat Gen2-1 (SkySat-3) separa-se a T+19m 0,58s. O primeiro dos doze satélite Dove – Flock-p (1) separa-se a T+20m 20,36s, enquanto que o último destes satélites separa-se a T+26m 30,36s.

Os satélites a bordo do PSLV-C34
A carga principal desta missão foi o satélite CartoSat-2C, um satélite de observação da Terra que irá fornecer imagens ópticas de alta-resolução às forças militares indianas. Este é o quinto satélite na série CartoSat, sendo o terceiro dedicado ao reconhecimento militar. O CartoSat-2C segue as pisadas do CartoSat-2A e do CartoSat-2B que foram colocados em órbita em 2008 e em 2010, respectivamente. Estes satélites são baseados nos modelos civis do Cartosat-2 que por sua vez é o sucessor do CartoSat-1.
Para além do CartoSat-2C foram transportados vinte satélites adicionais. Doze destes satélites eram CubeSats Flock-2, que são parte da constelação de satélites de observação da Terra da Planet Labs, fornecendo imagens comerciais da superfície do nosso planeta. Os satélites Flock-2p (1) a Flock-2p (12) têm uma massa de 4,7 kg cada. Esta constelação utiliza um grande número de pequenos satélites com vidas curtas em órbita para fornecer uma cobertura global. Este foi o 11º conjunto de satélites Flock a ser colocados em órbita, sendo os primeiros a ser lançados por foguetões PSLV.
Os satélites indianos SathyaBamaSat (SB Sat) e Swayam foram lançados para a Universidade de Sathyabama e para o Colégio Pune de Engenharia, respectivamente. O SathyaBamaSat é um CubeSat-2U que irá utilizar espectroscopia de infravermelhos para medir a concentração atmosférica dos gases de efeito de estufa. Por seu lado, o Swayam é um CubeSat-U que deverá demonstrar a utilização do campo magnético da Terra para fornecer um controlo de atitude passivo para o satélite. A bordo transporta também uma carga de rádio-amador.
O satélite Bispectral Infrared Optical System (BIROS) será operado pela agência espacial da Alemanha (Deutschen Zentrums für Luft und Raumfahrt – DLR). Tendo uma massa de 150 kg, o satélite irá operar em conjunto com o satélite TET-1 (colocado em órbita em 2012) como parte de um programa denominado FireBird que irá utilizar as capacidades de observação em infravermelhos dos dois satélites para detectar fontes de calor na superfície terrestre com o objectivo de identificar fogos florestais. O satélite deverá operar entre três a cinco anos. Para além da sua missão primária, o BIROS será utilizado para vários objectivos de demonstração tecnológica, incluindo as comunicações ópticas via laser para uplink e downlink, operações autónomas e navegação.
O pequeno satélite Berlin Experimental and Educational Satellite 4 (BEESAT-4) será colocado em órbita durante a missão do BIROS e irá servir como alvo para a demonstração de aproximação e afastamento autónomo. O BEESAT-4 é um CubeSat-U e foi construído pela Universidade Técnica de Berlim, transportando também uma experiência de GPS.
O satélite Greenhouse Gas Satellite Demonstrator (GHGSat-D), também denominado Claire, é um pequeno satélite de 15 kg construído pelo Instituto de Estudos Aeroespaciais da Universidade de Toronto para a GHGSat Global Emissions Monitoring, uma empresa de monitorização ambiental sediada em Montreal, Canadá. Sendo um percurso para a frota de satélites da companhia, o GHGSat-D será utilizado para demonstrar um espectroscópio hiperespectral operando nos comprimentos de onda de infravermelhos curtos que irão permitir a medição dos níveis de dióxido de carbono e de metano na atmosfera terrestre.
O satélite indonésio LAPAN-A3, ou LISat, é um satélite de detecção remota que será operado pelo Instituto Nacional de Aeronáutica da Indonésia e pela Universidade de Agricultura de Bogor. Com uma massa de 115 kg, o satélite será utilizado para monitorizar o uso e a condição do solo na Indonésia e para estudar as alterações ambientais que o afectam. O satélite transporta um sistema de observação multiespectral e um sistema de observação óptico digital, estando também equipado com um sistema receptor Automatic Identification System (AIS) para a retransmissão de dados e pedidos de socorro a partir de embarcações nos mares.
O satélite Maritime Monitoring and Messaging Microsatellite (M3MSat) é um veículo de demonstração tecnológica que será operado pela Agência Espacial do Canadá (CSA) e pelo Defence Research and Development Canada (DRDC). Desenvolvido em conjunto com a Com Dev International, que foi recentemente adquirida pela Honeywell, o satélite está equipado com dois receptores AIS que são mais potentes do que os receptores anteriormente colocados em órbita. O principal objectivo do M3MSat será o de demonstrar estes receptores em órbita, tanto operando de forma independente como em conjunto juntamente com imagens de radar da constelação Radarsat.
O SkySat Gen2-1 (ou SkySat-C1) é o primeiro satélite de observação operacional na frota da Terra Bella (anteriormente designada SkyBox Imaging), uma subsidiária da Google que foi formada em 2009 por quatro formandos da Universidade de Stanford. Estão planeados vinte e cinco satélites desta série.

O foguetão PSLV
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
 O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.
A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
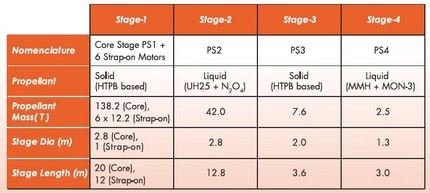 O quadro mostra as características do PSLV-C34 (massa no lançamento: 320.000 kg, altura: 44,4 metros).
O quadro mostra as características do PSLV-C34 (massa no lançamento: 320.000 kg, altura: 44,4 metros).
O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.


O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.
O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).

O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios:
• 1º Estágio: sistema SITVC (Secondary Injection Thrust Vector Control) para controlo de translação, e motores de reacção para controlo da rotação;
• 2º Estágio: movimentação do motor para controlo de translação e motor de controlo da rotação;
• 3º Estágio: escape (tubeira) flexível para controlo de translação e sistema de controlo de reacção PS-4 para controlo da rotação;
• 4º Estágio: movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.

A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.

Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5553
– Lançamento orbital com sucesso: 5201
– Lançamento orbital Índia: 53
– Lançamento orbital Índia com sucesso: 46
– Lançamento orbital desde Satish Dawan SHAR: 53
– Lançamento orbital desde Satish Dawan SHAR com sucesso: 46
Ao se referir a ‘lançamentos com sucesso’ significa um lançamento no qual algo atingiu a órbita terrestre, o que por si só pode não implicar o sucesso do lançamento ou da missão em causa (como foi o caso do lançamento do Progress M-27M).
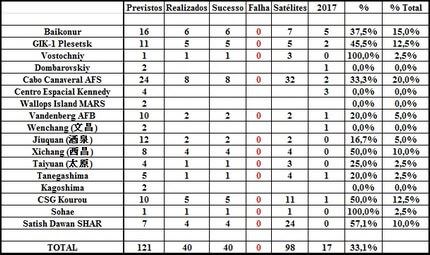
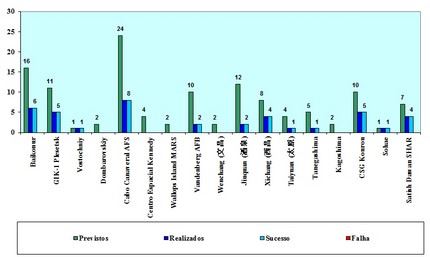
A seguinte tabela mostra os totais de lançamentos executados este ano em relação aos previstos para cada polígono à data deste lançamento.
Dos lançamentos bem sucedidos levados a cabo: 30,0% foram realizados pela Rússia; 25,0% pelos Estados Unidos (incluindo ULA (40,0%), SpaceX (60,0%) e Orbital SC); 17,5% pela China; 12,5% pela Arianespace; 10,0% pela Índia, 2,5% pelo Japão e 2,5% pela Coreia do Norte.
Os próximos lançamentos orbitais previstos são (hora UTC):
24 Jun (14:30:00) – Atlas-V/551 (AV-063) – Cabo Canaveral AFS, SLC-41 – MUOS-5
25 Jun (11:30:00) – CZ-7 Chang Zheng-7 (Y1) – Wenchang, LC201 – ???
07 Jul (01:36:00) – 11A511U-FG Soyuz-FG – Baikonur, LC1 PU-5 – Soyuz MS-01
16 Jul (05:32:00) – Falcon-9 (027) – Cabo Canaveral AFS, SLC-41 – Dragon SpX-9 (CRS9)
16 Jul (21:41:00) – 11A511U Soyuz-U – Baikonur, LC1 PU-5 – Progress MS-03