

A agência espacial Indiana, ISRO, falhou o lançamento de um novo satélite de navegação. O lançamento do satélite IRNSS-1H teve lugar às 1329UTC pelo foguetão PSLV-C39 no dia 31 de Agosto de 2017 a partir da Plataforma de Lançamento FLP do Centro Espacial Satish Dawan SHAR, Ilha de Sriharikota.
Esta falha termina uma sequência consecutiva de 36 lançamentos bem sucedidos nos últimos 20 anos por parte do foguetão PSLV, sendo a primeira da versão PSLV-XL em 18 voos.
Todas as fases iniciais do lançamento decorreram como previsto. Porém, as duas metades da carenagem de protecção não se separaram o que impediu a libertação do satélite em órbita, levando à sua perda total.
Após a injecção numa órbita preliminar, os dois painéis solares do IRNSS-1H seriam automaticamente abertos e as Instalações de Controlo Principal tomariam o controlo do satélite, realizando as suas manobras iniciais de elevação orbital que iriam consistir em duas manobras no perigeu e três manobras no apogeu. Para estas manobras, seria utilizado o motor LAM (Liquid Apogee Motor) do satélite.
Lançamento
A ignição do primeiro estágio ocorre a T=0s com os propulsores laterais de combustível sólido a entrarem em ignição aos pares e de forma sequencial: os propulsores 1 e 2 entram em ignição a T+0,42s, os propulsores 3 e 4 a T+0,62s e os propulsores 5 e 6 a T+25,0s, com o veículo já em voo e após deixar a plataforma de lançamento.
A separação dos propulsores 1 e 2 ocorre a T+1m 9,9s, seguindo-se a separação dos propulsores 3 e 4 a T+1m 10,1s e finalmente a separação dos propulsores 5 e 6 a T+1m 32,0s. O lançador continua a ascensão propulsionado pelo primeiro estágio até T+1m 50,26s, altura em que este se separa. A ignição do segundo estágio ocorre a T+1m 50,46s.
A separação da carenagem de protecção deveria ocorrer a T+3m 23.26s, pois é agora desnecessária e representa um peso extra para o lançador, sendo assim descartada. A separação seria sequencial com a quebra pirotécnica das ligações entre as duas metades da carenagem de protecção e de seguida, pela actuação de molas, a carenagem separa-se do veículo.
Terminada a queima do segundo estágio, este separar-se-ia a T+4m 23,08s, com a ignição do terceiro estágio a ocorrer 1,2 segundos depois. O terceiro estágio terminaria a sua queima a T+10m 6,72s, entrando num voo balístico de cerca de 10 segundos até à ignição do quarto estágio a T+11m 16,72s. Este terminaria a sua queima a T+18m 48,38s e a uma altitude de 455,27 km. A separação do satélite IRNSS-1H deveria ocorrer a T+19m 25,38s.
Os satélites IRNSS
Uma das marcas dos nossos dias no desenvolvimento espacial parece ser o facto de cada nação possuir o seu próprio sistema de navegação. Se os Estados Unidos iniciaram há já muitos anos o desenvolvimento do sistema GPS, a então União Soviética respondeu com o sistema GLONASS, seguindo-se o chinês Beidou / Compass e o europeu Galileo.


O sistema de navegação IRNSS
O sistema de navegação IRNSS (Indian Regional Navigation Satellite System) é, ao contrário de outros sistemas de navegação, um sistema de geoposicionamento regional cujo primeiro de sete satélites do seu segmento espacial, o IRNSS-1A, foi colocado em órbita a 1 de Julho de 2013.
O satélite tinha uma massa de 1.425 kg no lançamento (tendo uma massa de 598 kg sem propelentes a bordo). Os satélites estão equipados com duas asas solares com junções UTJ (Ultra Triple Junctions) que geram cerca de 1.660 Watts de energia eléctrica. As suas dimensões são 1,58 x 1,50 x 1,50 metros e o seu tempo de vida útil deverá ser de 12 anos. O referencial de orientação do satélite é proporcionado por sensores solares e estelares, bem como por giroscópios. Esquemas especiais de controlo térmico foram desenhados e implementados para alguns dos elementos críticos a bordo, tais como os relógios atómicos.
O sistema de controlo orbital e de atitude AOCS (Attitude and Orbit Control System) mantém a orientação do satélite com a ajuda de rodas de reacção, torques magnéticos e pequenos motores, enquanto que o sistema de propulsão é composto por um motor de apogeu de combustível líquido LAM (Liquid Apogee Motor) e pequenos propulsores.
A bordo dos satélites encontram-se duas cargas, sendo uma de navegação e outra para determinação de distâncias. A carga de navegação transmite sinais de navegação aos seus utilizadores e opera na banda L5 (1.176,45 MHz) e banda S (2.492,028 MHz). Um relógio atómico de rubídio altamente preciso faz também parte desta carga. Por seu lado, a restante carga tem como função determinar as distâncias através de um repetidor de banda C que facilita a determinação precisa das distâncias. O satélite também transporte os denominados Corner Cube Retro Reflectors para determinação de distância utilizando raios laser.
O IRNSS é um sistema de navegação regional por satélites independentes que foi projectado para fornecer serviços de localização precisa aos seus utilizadores na Índia bem como em regiões até 1.500 km das suas fronteiras, que constitui a área primária do serviço. A área de serviço alargada encontra-se entre a área de serviço primária e o rectângulo constituído entre a latitude 30º S a 50º Norte e longitude 30º Este e 130º Este.
Serão fornecidos dois tipos de serviço: o SPS (Standard Positioning Service) e o RS (Restricted Service). Enquanto que o SPS será fornecido a todos os utilizadores, o serviço RS (tratando-se de um serviço encriptado) será apenas fornecido aos utilizadores autorizados. Espera-se que o sistema IRNSS seja capaz de proporcionar uma precisão de mais de 20 metros na sua área principal de serviço.
O sistema IRNSS consiste num segmento espacial e num segmento de solo. O segmento espacial é composto por sete satélites, estando três em órbita geostacionária e quatro em órbitas geostacionárias inclinadas. O segmento de solo será responsável pela geração dos parâmetros de navegação e sua transmissão, controlo dos satélites, determinação de localização e monitorização da integridade e manutenção temporal.
O foguetão PSLV
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.
O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.


A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.
De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
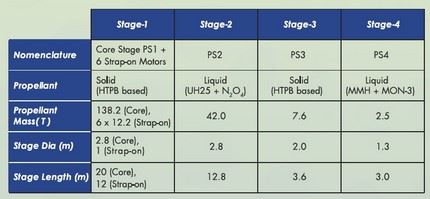 O quadro mostra as características do PSLV-C39 (massa no lançamento: 321.000 kg, altura: 44,4 metros).
O quadro mostra as características do PSLV-C39 (massa no lançamento: 321.000 kg, altura: 44,4 metros).
O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.
O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios:
• 1º Estágio: sistema SITVC (Secondary Injection Thrust Vector Control) para controlo de translação, e motores de reacção para controlo da rotação;
• 2º Estágio: movimentação do motor para controlo de translação e motor de controlo da rotação;
• 3º Estágio: escape (tubeira) flexível para controlo de translação e sistema de controlo de reacção PS-4 para controlo da rotação;
• 4º Estágio: movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.
Dados Estatísticos e próximos lançamentos
– Lançamento orbital: 5652
– Lançamento orbital Índia: 61
– Lançamento orbital desde Satish Dawan SHAR: 61

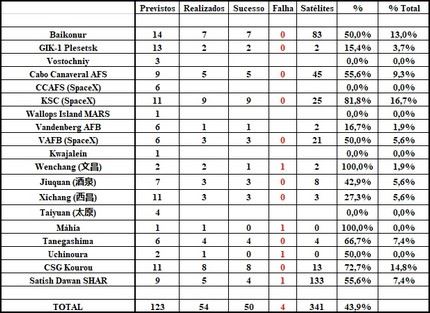
Dos lançamentos bem sucedidos levados a cabo em 2017: 12,0% foram realizados pelos Estados Unidos (incluindo ULA – 83,3% (5) e Orbital ATK – 16,7% (1)); 14,0% (7) pela China; 18,0% (8) pela Rússia; 16,0% (8) pela Arianespace; 8,0% (4) pela Índia; 8,0% (4) pelo Japão e 24,0% (12) pela SpaceX.
Os próximos lançamentos orbitais previstos são (hora UTC):
05 Set (2151:07) – Ariane-5ECA (VA239) – CSG Kourou, ELA3 – Intelsat-37e; BSat-4a
06 Set (????:??) – 14A14-1B Soyuz-2-1B/Fregat-M – GIK-1 Plesetsk, LC43/4 – Glonass n.º 52
06 Set (????:??) – CZ-2D Chang Zheng-2D – Jiuquan, LC43/603 – VRSS-2 ‘Antonio José de Sucre’
07 Set (????:??) – Falcon-9 – Cabo Canaveral AFS, LC-39A – AFSPC-7: OTV-5 (X-37B 01 flight 3)
11 Set (????:??) – 8K82KM Proton-M/Briz-M – Baikonur, LC200 PU-39 – Amazonas-5