

A China lançou sua quarta e mais ambiciosa missão de exploração lunar a 7 de Dezembro de 2018. O lançamento da sonda Chang’e-4 (嫦娥四号) com um rover lunar ocorreu às 18:23:34,367UTC a partir do Centro de Lançamento de Satélites de Xichang usando um foguetão lançador Chang Zheng-3B/G3Z (Y30) a partir do Complexo de Lançamento LC2.
O lançamento ocorreu na primeira oportunidade da janela de lançamento disponível entre as 1815UTC e as 1834UTC.
A missão Chang’e-4 faz parte da segunda fase do programa lunar da China, que inclui orbitar, alunar e retornar à Terra após sucesso das missões Chang’e-1, Chang’e-2 e Chang’e-3, em 2007, 2010 e 2013.
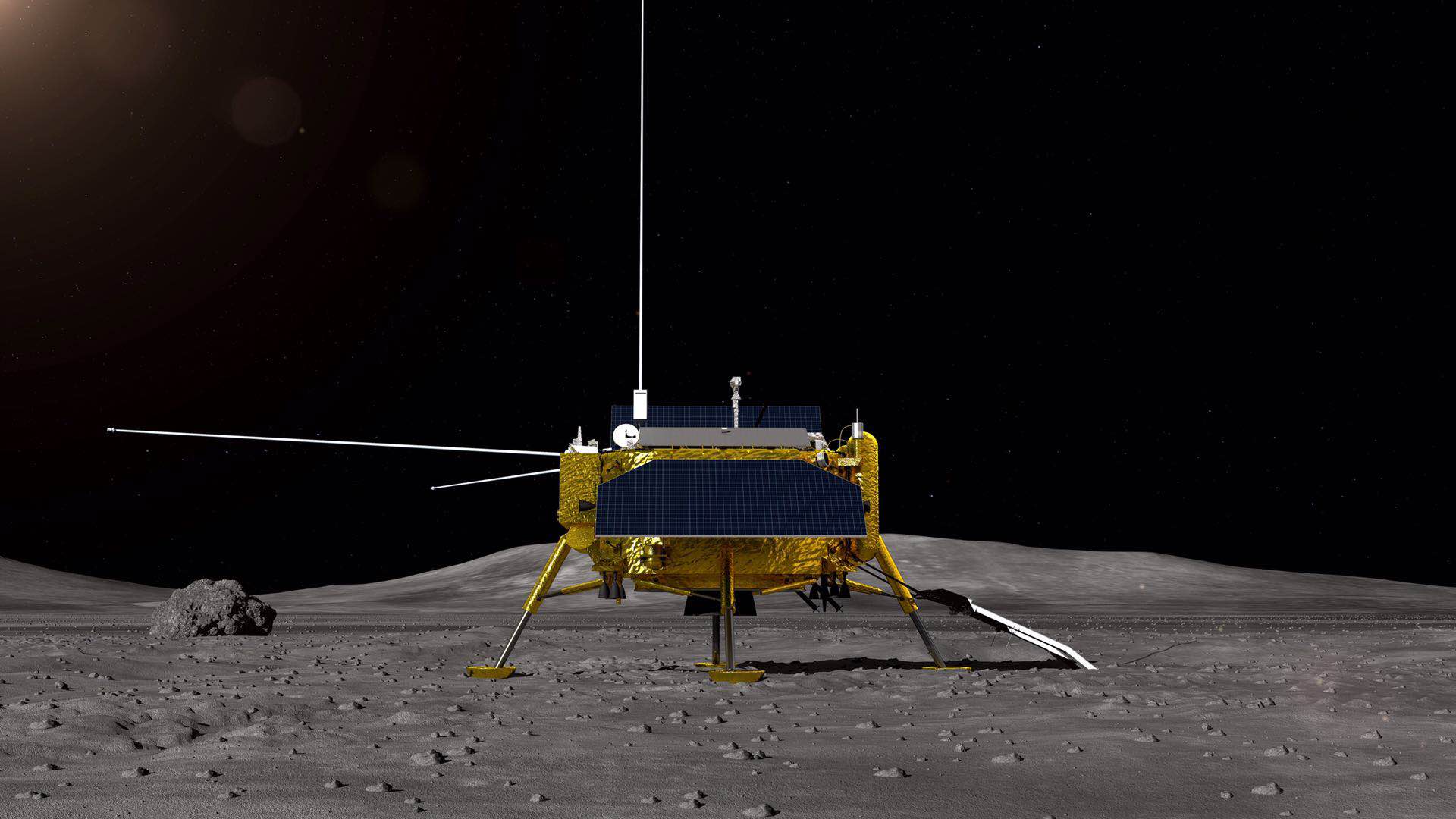
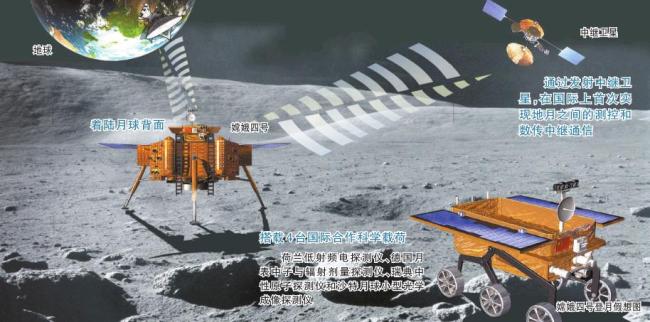
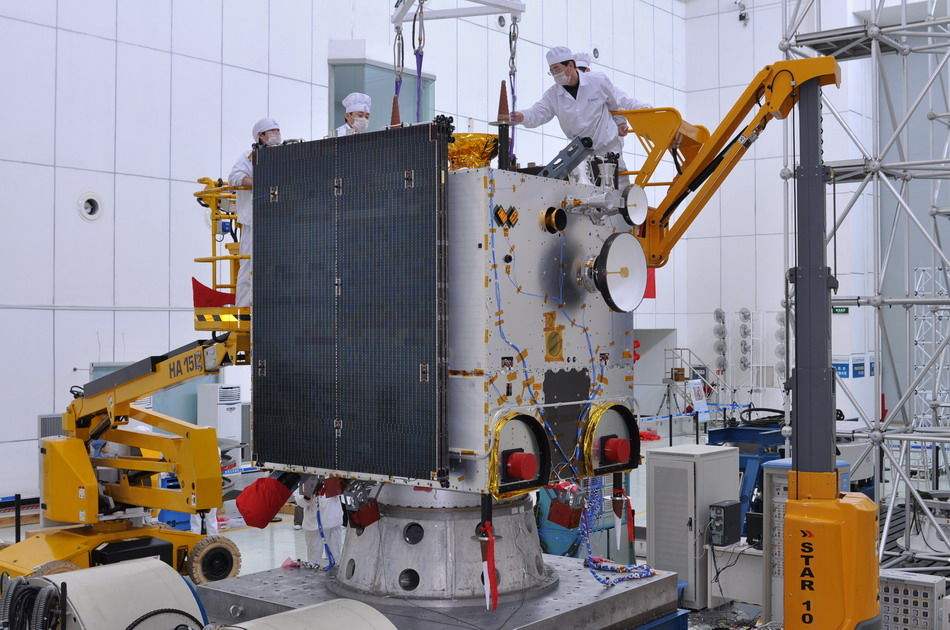
 A massa no lançamento da Chang’e-4 é de cerca de 3.780 kg, enquanto a plataforma de alunagem tem uma massa de cerca de 1.200 kg e o rover tem uma massa de 140 kg. A missão é composta por dois elementos distintos: o lander e o rover. O módulo de aterragem está equipado com um gerador termoeléctrico radioisótopo (RTG) para alimentar as operações lunares durante a missão de três meses. A energia será usada para alimentar a carga científica de sete instrumentos e câmaras.
A massa no lançamento da Chang’e-4 é de cerca de 3.780 kg, enquanto a plataforma de alunagem tem uma massa de cerca de 1.200 kg e o rover tem uma massa de 140 kg. A missão é composta por dois elementos distintos: o lander e o rover. O módulo de aterragem está equipado com um gerador termoeléctrico radioisótopo (RTG) para alimentar as operações lunares durante a missão de três meses. A energia será usada para alimentar a carga científica de sete instrumentos e câmaras.
O veículo lunar explorará a superfície lunar após descer do módulo de descida e está equipado com um painel solar para alimentar o veículo durante o dia lunar numa missão de três meses. Com 1,5 m de altura, o rover tem uma capacidade de carga de 20 kg, e será capaz de transmitir vídeo em tempo real, sendo também será capaz de escavar e realizar análises simples de amostras de solo.
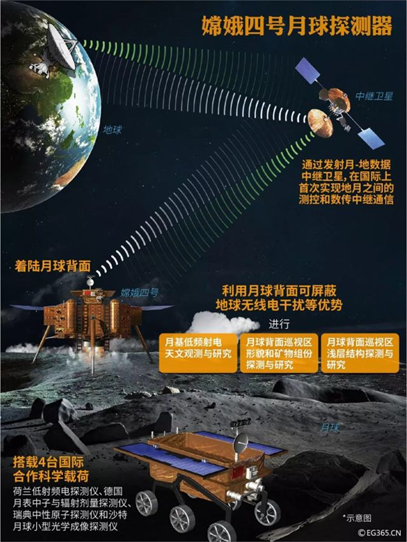
A sonda está equipada com uma importante carga científica, um espectrómetro de rádio de baixa frequência, especialmente projectado para o outro lado da lua.

O rover transporta a câmara panorâmica (PCAM) para obter imagens tridimensionais da superfície lunar no local de alunagem e observação para a investigação da morfologia da superfície e estrutura geológica, o Lunar Penetrating Radar (LPR) para levantamento da estrutura da sub-superfície lunar para investigar a morfologia da superfície e estrutura geológica, o Visible and Near-Infrared Imaging Spectrometer (VNIS) para espectroscopia de infravermelho de superfície lunar na área de investigação e obtenção de imagens para levantamento da composição dos materiais da superfície lunar e recursos disponíveis. O módulo de aterragem transporta a Landing Camera (LCAM), a Terrain Camera (TCAM) e o Low Frequency Spectrometer (LFS).
 Existem também três cargas de colaboração conjunta internacional na Chang’e-4, que são a Lunar Lander Neutrons and Dosimetry (LND) instalada na sonda e desenvolvida na Alemanha, o Advanced Small Analyzer for Neutrals (ASAN) instalado no rover para observações de átomos de energia neutra e iões positivos na área de exploração para investigar o ambiente de radiação de partículas, e o Netherlands-China Low-Frequency Explorer (NCLE) instalado no satélite de retransmissão Queqiao.
Existem também três cargas de colaboração conjunta internacional na Chang’e-4, que são a Lunar Lander Neutrons and Dosimetry (LND) instalada na sonda e desenvolvida na Alemanha, o Advanced Small Analyzer for Neutrals (ASAN) instalado no rover para observações de átomos de energia neutra e iões positivos na área de exploração para investigar o ambiente de radiação de partículas, e o Netherlands-China Low-Frequency Explorer (NCLE) instalado no satélite de retransmissão Queqiao.
O LFS foi desenvolvido recentemente para o módulo da Chang’e-4 e outros cinco tipos de cargas úteis são os instrumentos herdados da missão Chang’e-3.
O LFS será usado para detecção das características das baixas frequências de rádio emitidas pelo Sol e do ambiente de rádio de baixa frequência da Lua para realizar observações de radioastronomia de baixa frequência.
O LFS é usado para detectar o campo eléctrico de baixa frequência das tempestades solares e estudar o plasma lunar. Ao detectar o campo eléctrico de baixa frequência do Sol, do espaço planetário e do espaço galáctico, as informações de magnitude eléctrica, fase, variação temporal, espectro de frequência, polarização e DoA (Direction of Arrivals) são recolhidas para análise. Com características de variação do campo eléctrico de baixa frequência espacial, o ambiente de plasma Lunar acima do local de pouso será assim analisado. O LFS é configurado com uma antena activa de decomposição de três componentes para receber sinais electromagnéticos do Sol e do espaço. Cada uma das três unidades de antena recebe um dos três componentes ortogonais dos sinais electromagnéticos. De acordo com a teoria de transmissão de rádio, informações como a intensidade electromagnética, o espectro de frequência, a variação de tempo, as características de polarização e a direcção da fonte de radiação são obtidas pela análise e processamento dos dados de exploração.
 A câmara de pouso LCAM será usada para imagens ópticas da área de pouso durante a descida para investigar a morfologia da superfície e a estrutura geológica, enquanto o objetivo da TCAM será para a obtenção de imagens ópticas da área de pouso para investigar a morfologia da superfície e estrutura geológica.
A câmara de pouso LCAM será usada para imagens ópticas da área de pouso durante a descida para investigar a morfologia da superfície e a estrutura geológica, enquanto o objetivo da TCAM será para a obtenção de imagens ópticas da área de pouso para investigar a morfologia da superfície e estrutura geológica.
O LND foi desenvolvido pela Universidade Christian-Albrechts (CAU), Kiel – Alemanha, com contribuições do Instituto de Medicina Aeroespacial do Centro Espacial Alemão, do Centro Nacional de Ciências Espaciais (NSSC) e dos Observatórios Astronómicos Nacionais (NAOC), da Academia Chinesa de Ciências (CAS) e da Academia Chinesa de Tecnologia Espacial (CAST). O LND é apoiado pela DLR (Agência Espacial Alemã) através do Ministério Federal de Economia e Tecnologia.
O instrumento LND no veículo de descida da Chang’e-4 e tem dois objetivos científicos importantes para a dosímetria na exploração humana da Lua e para contribuir para a ciência heliosférica como um ponto de medição adicional.
 O LND é projectado para medir séries temporais de taxa de dose e de espectros de transferência de energia linear (LET) no complexo campo de radiação da superfície lunar. Para concretizar o segundo objetivo, o LND é capaz de medir fluxos de partículas e suas variações temporais e, assim, contribuir para o entendimento da propagação e transporte de partículas na heliosfera. O seu conjunto de 10 detectores de estado sólido de silício (SSDs) permite medir protões de 10-30 MeV, electrões de 60-500 keV, partículas alfa de 10-20 MeV / n e iões pesados de 15-40 MeV / n. Além disso, o LND pode medir neutrões rápidos na faixa de energia de 1 a 20 MeV e, usando dois detectores sanduíche de Gd, medir os fluxos de neutrões térmicos, que são sensíveis à água subterrânea e importantes para a compreensão dos processos de mistura da superfície lunar.
O LND é projectado para medir séries temporais de taxa de dose e de espectros de transferência de energia linear (LET) no complexo campo de radiação da superfície lunar. Para concretizar o segundo objetivo, o LND é capaz de medir fluxos de partículas e suas variações temporais e, assim, contribuir para o entendimento da propagação e transporte de partículas na heliosfera. O seu conjunto de 10 detectores de estado sólido de silício (SSDs) permite medir protões de 10-30 MeV, electrões de 60-500 keV, partículas alfa de 10-20 MeV / n e iões pesados de 15-40 MeV / n. Além disso, o LND pode medir neutrões rápidos na faixa de energia de 1 a 20 MeV e, usando dois detectores sanduíche de Gd, medir os fluxos de neutrões térmicos, que são sensíveis à água subterrânea e importantes para a compreensão dos processos de mistura da superfície lunar.
 A câmara panorâmica PCAM obterá imagens tridimensionais da superfície lunar no local de descida e da área coberta pelo roves para a investigação da morfologia da superfície e da estrutura geológica.
A câmara panorâmica PCAM obterá imagens tridimensionais da superfície lunar no local de descida e da área coberta pelo roves para a investigação da morfologia da superfície e da estrutura geológica.
Vindo da herança de Chang’e-3, o objetivo do radar de penetração lunar LPR é mapear o rególito lunar e detectar as estruturas geológicas do subsolo.
O espectrómetro Visible and Near-Infrared Imaging Spectrometer também é uma herança da Chang’e-3. O VNIS é capaz de simultaneamente adquirir in situ espectros de reflexão total para objetos na superfície lunar e realizar calibrações. O VNIS utiliza filtros sintonizáveis não-acústicos e consiste de um espectrómetro de imagem VIS / NIR (0,45-0,95 um), um espectrómetro IV de ondas curtas (0,9 a 2,4 µm) e uma unidade de calibração com funcionalidade à prova de poeira.
 O Advanced Small Analyzer for Neutrals – ASAN foi desenvolvido pelo Instituto Sueco de Física Espacial (IRF) em Kiruna, e será usado para levantamento da estrutura sub-superficial lunar por radar para investigar a morfologia da superfície e estrutura geológica, espectroscopia de imagens infra-vermelhas da superfície lunar e obtenção de imagens para levantamento da composição do material da superfície lunar e recursos disponíveis, além de fazer a detecção de dose de neutrões e radiação lunar e detecção atómica neutra para observações de átomos de energia neutra e iões positivos na área de observação para investigar o ambiente de radiação de partículas na área de descida.
O Advanced Small Analyzer for Neutrals – ASAN foi desenvolvido pelo Instituto Sueco de Física Espacial (IRF) em Kiruna, e será usado para levantamento da estrutura sub-superficial lunar por radar para investigar a morfologia da superfície e estrutura geológica, espectroscopia de imagens infra-vermelhas da superfície lunar e obtenção de imagens para levantamento da composição do material da superfície lunar e recursos disponíveis, além de fazer a detecção de dose de neutrões e radiação lunar e detecção atómica neutra para observações de átomos de energia neutra e iões positivos na área de observação para investigar o ambiente de radiação de partículas na área de descida.
A navegação lunar será feita usando sensores especiais para impedir que colidam com objetos como pequenas pedras ou grandes pedregulhos.
O rover lunar autónomo que se separa da sonda será controlado quando necessário pelos cientistas da Terra. O rover usa seis rodas que são alimentadas individualmente. As rodas usam um sistema de suspensão muito semelhante ao utilizado nos veículos da MER e Curiosity da NASA.
Depois de entrar na órbita lunar, o Chang’e-4 passará por seis etapas de desaceleração para descer a partir de um ponto a 15 km acima da superfície lunar usando seu único motor de impulso variável. Durante a descida, a atitude da sonda será controlada usando 28 pequenos motores.
Na órbita lunar, a sonda Chang’e-4 preparará-se para a descida. Após a desaceleração primária, a sonda ajustará rapidamente sua atitude, aproximando-se da superfície lunar. Nesta fase, os instrumentos analisarão a área de descida prevista, pairando sobre ela. Se necessário, o Chang’e-4 manobrará numa manobra de prevenção de risco e entrará na fase de descida final numa descida constante de baixa velocidade. O motor principal é desligado automaticamente a uma altitude de 4 metros, caindo livremente na superfície.
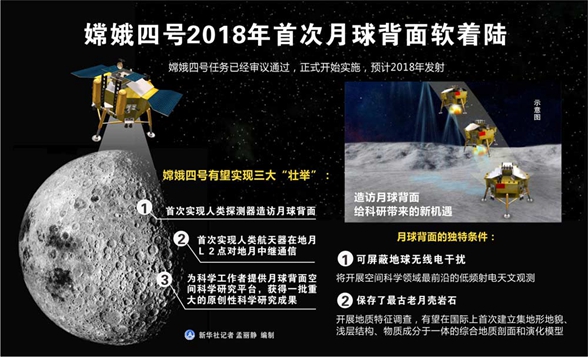
A sonda pousará na cratera de Von Kármán, no Pólo Sul-Aitken.
Os processos de alunagem suave das sondas não tripuladas dos Estados Unidos e da antiga União Soviética não tinham capacidade de pairar ou evitar obstáculos. A Chang’e-4, por outro lado, pode pesquisar com precisão os acidentes geográficos no local de pouso e identificar os locais mais seguros para pousar. Para pousar rapidamente, a sonda é equipada com sensores de alta precisão e rápida resposta para analisar seu movimento e arredores. O motor de impulso variável (completamente projectado e fabricado por cientistas chineses) pode gerar até 7.500 Newtons de impulso.
A bacia do Pólo Sul-Aitken é a maior e mais antiga bacia de impacto reconhecida na Lua com um diâmetro de aproximadamente 2.500 km. A circunferência lunar é de pouco menos de 11.000 km, o que significa que a bacia se estende por quase um quarto da Lua, estendendo-se desde a cratera Aitken no norte e todo o caminho até o Pólo Sul. Dados topográficos mostraram o enorme efeito que o impacto do Pólo Sul-Aitken teve na Lua, com a bacia a ter mais de 8 km de profundidade.
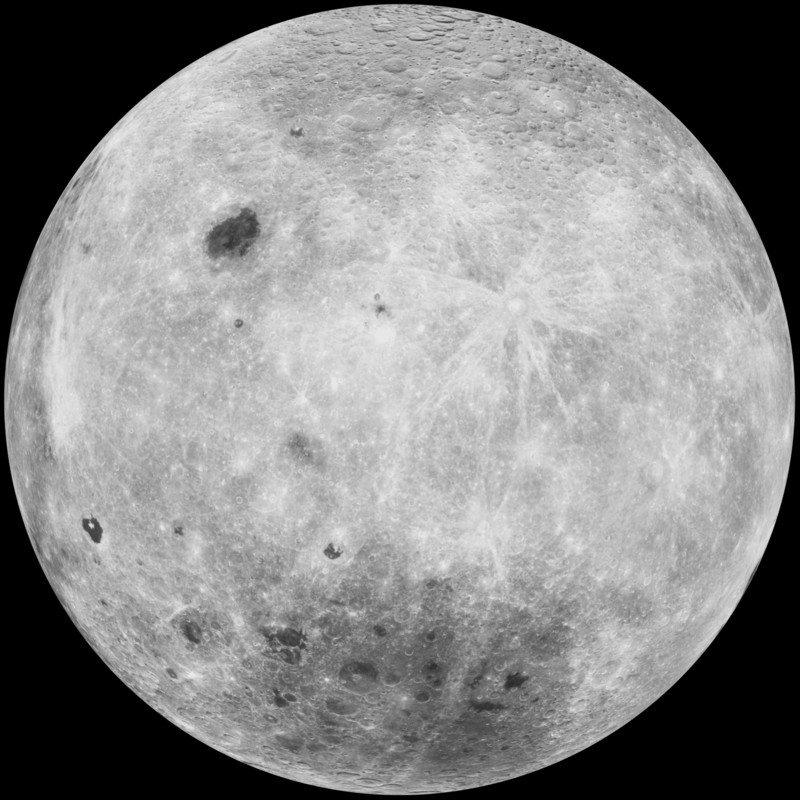
A bacia Pólo Sul-Aitken surge como a zona mais escura no fundo da imagem.
Imagem: NASA/Goddard Space Flight Center Scientific Visualization Studio
Relações estratigráficas mostram que o Pólo Sul-Aitken é a mais antiga bacia de impacto da Lua. Amostras lunares sugerem que a maioria das principais bacias da Lua se formou há cerca de 3,9 bilhões de anos num período chamado de ‘bombardeamento pesado tardio’. Nessa altura, a maioria dos grandes detritos dentro do Sistema Solar já deveria ter-se acumulado para formar os planetas, portanto um número tão grande de grandes impactos ocorrendo quase ao mesmo tempo pode ter sido devido à dinâmica gravitacional incomum no início do Sistema Solar. Será que impacto que causou a bacia do Pólo Sul-Aitken também fez parte de algum evento cataclísmico ocorrido a 3,9 bilhões de anos atrás? Se assim for, esse impacto é uma forte evidência de um evento extremo que teria afectado todos os planetas terrestres, incluindo a Terra, numa época em que a vida estava apenas a começar. Se a bacia for muito mais antiga, isso pode sugerir que, em vez de um pico na taxa de impacto de 3,9 bilhões de anos, o número de impactos simplesmente se afastou de um pico anterior.
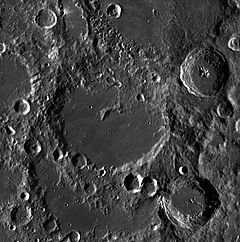 Com um diâmetro de cerca de 186 km, a cratera de Von Kármán, situada na bacia do Pólo Sul-Aitken, a Noroeste, foi formada no pré-nectário. O leito da cratera de Von Kármán foi subsequentemente inundado com uma ou várias gerações de basaltos durante o período Ímbrio. Numerosas crateras de impacto posteriores na região circundante entregaram material ejectado ao chão da cratera, formando uma rica amostra da bacia do Pólo Sul-Aitken e da história geológica do lado oposto. A topografia da região de aterragem é geralmente plana a uma linha de base de cerca de 60 metros.
Com um diâmetro de cerca de 186 km, a cratera de Von Kármán, situada na bacia do Pólo Sul-Aitken, a Noroeste, foi formada no pré-nectário. O leito da cratera de Von Kármán foi subsequentemente inundado com uma ou várias gerações de basaltos durante o período Ímbrio. Numerosas crateras de impacto posteriores na região circundante entregaram material ejectado ao chão da cratera, formando uma rica amostra da bacia do Pólo Sul-Aitken e da história geológica do lado oposto. A topografia da região de aterragem é geralmente plana a uma linha de base de cerca de 60 metros.
A missão Chang’e-4, alunar no lado oculto da Lua, será importante para o estudo da formação e evolução planetária, e será um local de observação ideal para a radioastronomia de baixa frequência.
O estudo da bacia do Pólo Sul-Aitken pode beneficiar a descoberta da composição material da crosta lunar e do manto. Por isso, abre uma importante janela para o estudo da composição material da camada profunda da Lua.
O Pólo Sul-Aitken é uma bacia com uma altitude de 13 km abaixo das terras altas circundantes e é composta por crosta fina. Seja nos modos passivos ou activos que trazem o basalto da égua lunar, deve ter surgido grande quantidade de basalto na bacia do Pólo Sul-Aitken. No entanto, os dados obtidos actualmente não podem provar efectivamente que a bacia tem basalto abundante. Por outro lado, a ausência de basalto pode indicar algo aconteceu no processo de evolução térmica e diferenciação Lunar nos primeiros tempos.
Além disso, comparando as crateras na bacia do Pólo Sul-Aitken com os mares lunares, podemos ver que a situação de degradação nessa bacia não é óbvia. Nenhuma cratera com raios lunares foi descoberta na bacia do Pólo Sul-Aitken, portanto a formação, a evolução, a topografia e as características químicas das crateras são aparentemente diferentes das de outros terrenos.
A observação astronómica de ondas de rádio é um dos métodos mais eficazes para estudar e entender o Universo. Actualmente, a maior parte do espectro foi detectada, em ultravioleta, ondas de rádio (comprimento de onda menor que metros), raios X, infravermelhos, milimétrica e raios gama. Mas nenhuma onda miométrica (<30 MHz) foi detectada ainda. A detecção de ondas miométricas é de grande importância para imagens do céu obtidas através de varredura contínua de fontes de rádio discretas, física solar, clima espacial, raios cósmicos de energia extremamente alta e estudo de neutrinos.
Interferidas pela ionosfera e pelas ondas de rádio da Terra, é impossível detectar as ondas miométricas na Terra. O satélite RAE-A foi lançado em 1968 e operava em órbita próxima da Terra. O seu objetivo científico era detectar a intensidade dos raios cósmicos (0,2 a 20 MHz), porém a sua missão sofreu interferências de ondas de rádio na órbita da Terra. O RAE-B foi lançado em 1973 e foi colocado na órbita lunar. O seu objetivo científico era detectar ondas de rádio de comprimento de onda longo (frequência de 25 kHz a 13,1 MHz). O RAE-B demonstrou que o lado mais distante da lua é ideal para a detecção des ondas miométricas.
Actualmente, a detecção de rádio de baixa frequência foi conseguida principalmente através de naves espaciais operando em órbita circum-circular, mas nenhum deles o fez na superfície lunar.
A exploração de Change’4 promoverá ainda mais a compreensão do lado oculto da lua. Com análises e estudos abrangentes sobre os dados de exploração próximos, um entendimento mais geral sobre a Lua será obtido e a fiabilidade de um sistema teórico será aumentada.

A Longa Marcha para a Lua
A Longa Marcha para a Lua por parte da China começou em 1998, quando a Comissão de Ciência, Tecnologia e Indústria para a Defesa Nacional (COSTIND) começou a planear a missão lunar, abordando os principais problemas científicos e tecnológicos. O projecto orbital lunar foi formalmente estabelecido em Janeiro de 2004 e no mês seguinte o programa é chamado de “Projecto Chang’e” em honra de uma deusa da mitologia Chinesa que voou para a lua.

A primeira missão, Chang’e-1, foi lançada com sucesso em 24 de Outubro de 2007, entrando na órbita lunar em 7 de Novembro.
Em 26 de Novembro, a Chang’e-1 transmite para a Terra a voz da sonda e a música chinesa “Ode à Pátria”. A primeira foto da China sobre a superfície lunar é publicada pela agência de notícias Xinhua a 31 de Janeiro de 2008. O primeiro holograma lunar com uma resolução de 7 metros foi publicado em 12 de Novembro, com base em dados recolhidos pela Chang’e-1. Enquanto isso, a missão Chang’e-2 é aprovada em Outubro de 2008 pelo Conselho de Estado chinês.
A missão de Chang’e-1 termina quando a sonda impacta na Lua sob controle 1 de Março de 2009.
A Chang’e-2 foi lançada com sucesso a bordo de um foguetão Chang Zheng-3C a 1 de Outubro de 2010. Um dos objetivos da missão era verificar as principais tecnologias antes do pouso suave. Entrando em órbita lunar a 9 de Outubro após um vôo de 112 horas, em 26 de Outubro, a sonda manobrou para uma órbita elíptica e tirou uma série de fotos com uma resolução de 1,5 metros da região de Sinus Iridium, o local de pouso escolhido para a Chang’e-3. Depois de tirar fotos da área, a sonda volta à sua órbita original em 29 de Outubro. As imagens de Sinus Iridium são publicadas a 8 de Novembro pela Administração Estadual de Ciência, Tecnologia e Indústria para Defesa Nacional (SASTIND).
Os seis objetivos de engenharia e os quatro objectivos científicos da Chang’e-2 são concluídas a 1 de Abril de 2011 e até o final de Maio a sonda examina os pólos Sul e Norte da Lua, tirando fotos de alta resolução do local de alunagem da Chang’e-3. A missão estendida na órbita lunar termina no dia 8 de Junho e então a sonda parte para a órbita de Lagrange (L2), chegando a 22 de Agosto. Neste ponto a gravidade do Sol e da Terra agem de forma a equilibrar o movimento da sonda. O principal objetivo desta parte da missão era testar a rede chinesa de rastreamento e controlo.
A Chang’e-2 parte do ponto L2 a 15 de Abril de 2012, indo agora para uma missão prolongada que a levou a um encontro de 3,2 km com o asteróide Toutatis em 13 de Dezembro, tirando fotos com uma resolução de 10 metros.
Lançada a 1 de Dezembro de 2013, a Chang’e-3 foi a terceira missão lunar robótica dentro do Programa de Exploração Lunar da China. O objetivo era pousar suavemente na superfície da lua e colocar na superfície um veículo lunar não tripulado (Yutu) para explorar as áreas em volta do local de pouso. A missão foi chefiada pela SASTIND (Administração Estatal de Ciência, Tecnologia e Indústria para Defesa Nacional) e o principal contratante para a investigação foi o CAST (Academia de Tecnologia Espacial da China) da Corporação de Ciência e Tecnologia Aeroespacial da China (CASC). A CAST, por sua vez, contratou o Instituto de Engenharia do Sistema Aeroespacial de Xangai para projectar e desenvolver a sonda.

A Chang’e-3 fez parte da segunda fase do programa lunar da China. O Yutu foi o primeiro lunar lunar da China e a primeira nave espacial em 37 anos a fazer uma alunagem suave, desde a missão soviética Luna-24 em 1976. O local de alunagem da Chang’e-3 / Yutu foi a área de Sinus Iridum perto do Mare Imbrium.
A Chang’e-3 e o lunar Yutu pousaram na superfície lunar às 1311UTC do dia 14 de Dezembro de 2013. Após a desaceleração, o veículo rapidamente ajustou sua atitude, aproximando-se da superfície lunar. Durante essa fase, os instrumentos analisaram a área de descida prevista. O motor principal foi desligado automaticamente a uma altitude de quatro metros, permitindo que o rover caia livremente na superfície.
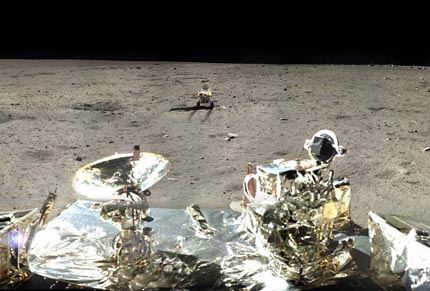
A sequência de descida foi executada com perfeição, fazendo com que o veículo seleccionasse seu ponto de pouso preferido quase imediatamente, chegando mesmo a pousar sem demora, tecnicamente 30 minutos antes do previsto. Após o pouso suave, Chang’e-3 libertou o rover Yutu que logo começou a comunicar com o controle da missão. Depois que as comunicações foram estabelecidas, o Yutu desbloqueou o mecanismo de encaixe e, de seguida, dirigiu-se ao mecanismo de transferência para a superficie lunar. O mecanismo de transferência então desceu para a superfície da lua e o rover afastou-se da Chang’e-3.
Cerca de nove horas após a separação, a Chang’e-3 e o rover Yutu começaram a capturar algumas fotografias um do outro usando as câmaras integradas. O lander ia equipado com um gerador termoeléctrico radioisótopo (RTG) para alimentar as operações lunares durante a missão de três meses. A energia foi usada para alimentar a carga científica de sete instrumentos e câmaras.
A sonda Chang’e-3 também transportou quatro instrumentos: o MastCam, a Câmara de Descida, o Lunar-based Ultraviolet Telescope (LUT) e o Extreme Ultraviolet Imager (EUV).
O Yutu foi equipado com um painel solar para alimentar o veículo durante o dia lunar numa missão de três meses. Durante esse tempo, o rover explorou uma área de três quilómetros quadrados, viajando a uma distância máxima de 10 km do ponto de descida. O rover era capaz de transmitir vídeo em tempo real, enquanto era capaz de cavar e realizar análises simples de amostras de solo. Para as transmissões de vídeo em tempo real, o Yutu usou a PanCam. Essas câmaras forneceram imagens estéreo em alta resolução.
No total, o rover Yutu levou quatro instrumentos: o PanCam; o Ground Penetration Radar (GPR); o espectrómetro VIS/NIR Imaging Spectrometer (VNIS); e o espectrómetro Alpha Particle X-Ray Spectrometer (APXS).
O foguetão lançador CZ-3B Chang Zheng-3B/G3Z
O foguetão CZ-3B Chang Zheng-3B (长征三号乙火箭) representa uma evolução em relação ao lançador orbital CZ-3A Chang Zheng-3A (长征三号甲火箭), sendo um dos veículos mais potentes disponíveis pela China. É um lançador a três estágios auxiliados por quatro propulsores laterais de combustível hipergólico, possuindo uma grande capacidade de carga para a órbita de transferência para a órbita geossíncrona utilizando para tal tanques de propolente mais largos e uma maior ogiva. Na versão CZ-3B/G2, o lançador tem os seus propulsores laterais bem como o primeiro estágios alongados, permitindo o transporte de uma maior quantidade de prepolentes. Na versão CZ-3B/G3Z, o terceiro estágio do lançador tem o seu desempenho melhorado para missões lunares ou interplanetárias.



A Academia Chinesa de Tecnologia de Veículos Lançadores (CALT) iniciou o desenho do CZ-3A Chang Zheng-3A em meados dos anos 80. O CZ-3A é um veículo lançador a três estágios com uma capacidade de 2.600 kg para a órbita de transferência para a órbita geossíncrona. O seu terceiro estágio utiliza propolentes criogénicos, isto é hidrogénio e oxigénio líquido. A capacidade do CZ-3B para a órbita de transferência para a órbita geossíncrona atinge os 5.100 kg ao utilizar quatro propulsores laterais e um segundo estágio mais alongado. O CZ-3B proporciona quatro tipos de carenagens de protecção e quatro tipos distintos de interfaces de carga que proporcionam assim aos utilizadores mais flexibilidade. As principais características do CZ-3B estão assinaladas na seguinte tabela.

O sistema do CZ-3B é composto pela estrutura do foguetão lançador, sistema de propulsão, sistema de controlo, sistema de telemetria, sistema de rastreio e segurança, sistema de controlo de atitude e de gestão de propolente na fase orbital não propulsiva, sistema de utilização de propolente criogénico, sistema de separação e sistema auxiliar.
A estrutura do foguetão actua de forma a suportar as várias cargas internas e externas no lançador durante o transporte, elevação (colocação na plataforma de lançamento) e voo. A estrutura do foguetão também combina todos os subsistemas em conjunto. A estrutura do foguetão é composta pelos propulsores, primeiro estágio, segundo estágio, terceiro estágio e carenagem de protecção. A figura na página seguinte mostra a configuração do foguetão CZ-3B Chang Zheng-3B.

Cada propulsor lateral é composto pela zona frontal, tanque de oxidante, zona inter-tanque, tanque de combustível, secção posterior, secção de cauda, estabilizador, válvulas e condutas, etc. O primeiro estágio é composto pela secção inter-estágio, tanque de oxidante, inter-tanque, tanque de combustível, secção posterior, secção de cauda, válvulas e condutas, etc. O segundo estágio é composto pelo tanque de oxidante, inter-tanque, tanque de combustível, válvulas e condutas, etc.
O terceiro estágio contém o adaptador de carga, secção de equipamento e tanque de propolente criogénico. O adaptador de carga faz a ligação física entre a carga e o foguetão CZ-3B e reparte as cargas entre ambos. O anel da interface no topo do adaptador pode ser uma das interfaces standard internacionais 937B, 1194, 1194A ou 1666. A secção de equipamento para o método de introdução da carga na plataforma de lançamento (Encapsulation-on-pad) é uma placa circular fabricada numa estrutura metálica em favos de mel onde estão montados os sistemas aviónicos do lançador. Se a carenagem é montada no método BS3, a secção de equipamento será uma estrutura cilíndrica com uma altura de 0,9 metros apoiada no terceiro estágio (As duas figuras seguintes mostram os diferentes tipos de secção de equipamento). O tanque de propolente do terceiro estágio é termicamente isolado com um anteparo comum, tendo uma forma convexa superior no meio. O hidrogénio líquido é abastecido na parte superior do tanque e o oxigénio líquido é armazenado na parte inferior.
O estágio superior Yuanzheng-1 (“Expeditção-1″) utiliza um pequeno motor com uma força de 6,5 kN que consome UDMH/N2O4 com um impulso específico de 3,092 km/s. O estágio superior é capaz de levar a cabo duas queimas, tendo um tempo de vida de 6,5 horas e é capaz de atingir várias altitudes orbitais.
A carenagem é composta por uma abóbada, secção bicónica, secção cilíndrica e secção cónica invertida.


O sistema de rastreio e de segurança mede os dados da trajectória e parâmetros de injecção orbital finais. O sistema também fornece informação para meios de segurança. A auto-destruição do foguetão lançador seria levada a cabo de forma remota caso ocorresse alguma anomalia em voo. O desenho da medição de trajectória e de segurança são integrados em conjunto.
O sistema de controlo de atitude e de gestão de propolente na fase de voo não propulsionada leva a cabo o controlo de atitude e gestão de propolente em órbita e reorienta o lançador antes da separação da carga. Um motor alimentado por hidrazina em pressão trabalha de forma intermitente neste sistema que pode ser accionado repetidamente segundo os comandos recebidos.
O sistema de utilização dos propolentes criogénicos mede em tempo real o nível de propolentes no interior dos tanques do terceiro estágio e ajusta o nível de consumo de oxigénio líquido para tornar os propolentes residuais numa proporção óptima. O ajustamento é utilizado para compensar o desvio da performance do motor, estrutura da massa, carga de propolente, etc., para o propósito de se obter uma maior capacidade de lançamento. O sistema contém um processador, sensores de nível de propolente e válvulas de ajustamento.
Os seguintes esquemas representam a estrutura dos sistemas de propulsão do primeiro, segundo e terceiro estágios.



Durante a fase de voo do CZ-3B Chang Zheng-3B existem cinco eventos de separação: a separação dos quatro propulsores laterais, a separação entre o segundo e o primeiro estágio, a separação entre o segundo e o terceiro estágio, a separação da carenagem e a separação entre a carga e o terceiro estágio: 1) Separação dos propulsores – os propulsores laterais estão acoplados ao primeiro estágio por três piromecanismos localizados na secção frontal e por mecanismos de separação na secção posterior. Quatro pequenos foguetões geram forças de separação para o exterior após a abertura simultânea dos mecanismos de separação; 2) Separação entre o primeiro e o segundo estágio – a  separação entre o primeiro e o segundo estágio é uma separação a quente, isto é o segundo estágio entra em ignição em primeiro lugar e depois o primeiro estágio é separado com a força dos gases de exaustão após o accionamento de 14 parafusos explosivos; 3) Separação entre o segundo e o terceiro estágio – a separação entre o segundo e o terceiro estágio é uma separação a frio. Os parafusos explosivos são accionados em primeiro lugar e depois pequenos retro-foguetões no segundo estágio são accionados para gerar a força de separação; 4) Separação da carenagem – durante a separação da carenagem, os parafusos explosivos que ligam a carenagem e o terceiro estágio são accionados em primeiro lugar e depois todos os dispositivos pirotécnicos que ligam as duas metades da carenagem são accionados, com a carenagem a ser separada longitudinalmente. A carenagem volta-se para fora apoiada em dobradiças devido à força exercida por molas; 5) Separação entre a carga e o terceiro estágio – a carga está fixa com o lançador ao longo de uma banda de fixação. Após a separação, a carga é empurrada pela acção de molas.
separação entre o primeiro e o segundo estágio é uma separação a quente, isto é o segundo estágio entra em ignição em primeiro lugar e depois o primeiro estágio é separado com a força dos gases de exaustão após o accionamento de 14 parafusos explosivos; 3) Separação entre o segundo e o terceiro estágio – a separação entre o segundo e o terceiro estágio é uma separação a frio. Os parafusos explosivos são accionados em primeiro lugar e depois pequenos retro-foguetões no segundo estágio são accionados para gerar a força de separação; 4) Separação da carenagem – durante a separação da carenagem, os parafusos explosivos que ligam a carenagem e o terceiro estágio são accionados em primeiro lugar e depois todos os dispositivos pirotécnicos que ligam as duas metades da carenagem são accionados, com a carenagem a ser separada longitudinalmente. A carenagem volta-se para fora apoiada em dobradiças devido à força exercida por molas; 5) Separação entre a carga e o terceiro estágio – a carga está fixa com o lançador ao longo de uma banda de fixação. Após a separação, a carga é empurrada pela acção de molas.
O sistema de coordenadas do foguetão lançador (OXYZ) tem origem no centro de massa instantâneo do veículo, isto é no centro de massa integrado da combinação carga / veículo lançador, incluindo o adaptador, propolentes e carenagem, etc., caso seja aplicável. O eixo OX coincide com o eixo longitudinal do foguetão. O eixo OY é perpendicular ao eixo OX e estão no interior do plano de lançamento 180º para lá do azimute de lançamento. Os eixos OX, OY e OZ formam um sistema ortogonal que segue a regra da mão direita.
A atitude de voo do eixo do veículo lançador está definida na figura ao lado. O fabricante do satélite define o sistema de coordenadas do satélite. A relação ou orientação entre o veículo lançador e os sistemas do satélite serão determinados ao longo da coordenação técnica para projectos específicos.
Missões que podem ser realizadas pelo CZ-3B
O foguetão CZ-3B Chang Zheng-3B é um veículo potente e versátil que é capaz de levar a cabo as seguintes missões: Transportar cargas para órbitas de transferência para a órbita geossíncrona (GTO). Esta será a função primária do CZ-3B e o objectivo da sua concepção. Após a separação do CZ-3B, o satélite irá transferir-se da órbita GTO para a órbita geossíncrona GEO). Esta é a órbita operacional na qual o período orbital do satélite coincide com o período de rotação da Terra, 24 horas, e o plano orbital coincide com o plano do equador (ver figura em baixo); Injectar cargas numa órbita terrestre baixa (LEO) localizada abaixo de uma altitude média de 2.000 km; Injectar cargas em órbitas sincronizadas com o Sol (SSO). O plano destas órbitas encontra-se ao longo da direcção de rotação do eixo de rotação da Terra ou aponta para a rotação da Terra em torno do Sol. A velocidade angular do satélite é igual à velocidade angular média da Terra em torno do Sol; Lançar sondas espaciais para lá do campo gravitacional da Terra.

Performance do CZ-3B Chang Zheng-3B
O primeiro lançamento do CZ-3B teve lugar a 14 de Fevereiro de 1996 (1901UTC) quando o veículo Y1 tentou colocar em órbita o satélite Intelsat-708. Infelizmente o lançamento levado a cabo desde o Centro de Lançamento de Satélites de Xichang não foi bem sucedido devido a um problema no sistema de orientação do lançador que acabou por se despenhar 22 segundos após abandonar a plataforma de lançamento LC2, matando ou ferindo 59 pessoas.
Mais recentemente foi introduzida uma versão melhorada do CZ-3B com capacidade de carga GTO para os 5.500 kg. O CZ-3B/G2 (também designado CZ-3B/E) tem basicamente a mesma configuração do CZ-3B exceptuando um estágio central mais alargado. O primeiro voo do CZ-3B/G2 teve lugar a 13 de Maio de 2007 e agora é a versão standard do lançador em utilização.
Descrição da missão do CZ-3B
O CZ-3B é principalmente utilizado para missões para a órbita GTO, sendo a GTO standard recomendada ao utilizador do veículo. O CZ-3B coloca a carga numa GTO standard com os seguintes parâmetros a partir de Xichang: altitude do perigeu – 200 km; altitude do apogeu – 35.954 km, inclinação 28,5º; argumento do perigeu – 178º (estes parâmetros representam a órbita instantânea a quando da separação do satélite do terceiro estágio; A altitude do perigeu é equivalente a uma altitude real de 35.786 km na passagem do primeiro perigeu devido a perturbações causadas pela forma oblatada da Terra). Os quadros seguintes mostram a sequência de voo típica do CZ-3B Chang Zheng-3B.
A discussão da performance do foguetão CZ-3B Chang Zheng-3B é baseada na assumpção de que o veículo é lançado desde o Centro de Lançamento de Satélites de Xichang tendo em conta as limitações relevantes no que diz respeito à segurança e requerimentos de rastreio a partir do solo; tem-se em conta que o azimute de lançamento é de 97,5º; a massa do adaptador de carga e do sistema de separação não estão incluídas na massa da carga; o terceiro estágio do CZ-3B transporta a quantidade suficiente de propolente para atingir a órbita pretendida com uma probabilidade superior a 99,73%; por altura da separação da carenagem de protecção o fluxo aerodinâmico é inferior a 1.135 W/m2; e os valores das altitudes orbitais são determinados em relação a uma Terra esférica com um raio de 6.378 km.


As carenagens do CZ-3B
A carga está protegida por uma carenagem que a isola de várias interferências da atmosfera, que inclui correntes de ar de alta velocidade, cargas aerodinâmicas, aquecimento aerodinâmico e ruídos acústicos, etc., enquanto que o lançador ascende através da atmosfera. A carenagem proporciona assim à carga um bom meio ambiente.
O aquecimento aerodinâmico é absorvido ou isolado pela carenagem. A temperatura no interior da carenagem é controlada dentro dos limites estabelecidos. Os ruídos acústicos gerados por correntes de ar e pelos motores do lançador são reduzidos para níveis permitidos para a respectiva carga.
A carenagem é separado e ejectada quando o foguetão lançador voa fora da atmosfera. A altura exacta da separação da carenagem é determinada pelo requisito de que o fluxo de calor aerodinâmico na separação da carenagem seja inferior a 1.135 W/m2.
Vinte e dois tipos de testes foram levados a cabo no desenvolvimento da carenagem do CZ-3B, incluindo testes em túneis de voo, testes térmicos, testes acústicos, testes de separação, testes de análise de modelos, testes de resistência, etc.
O CZ-3B Chang Zheng-3B proporciona quatro tipos distintos de carenagens: 4000F, 4000Z, 4200F e 4200Z, conforme referidas no seguinte quadro:

A carenagem 4000F tem uma altura de 9,561 metros e suporta as interfaces de carga 937B, 1194, 1194A e 1666. A carenagem 4200F tem uma altura de 9.777 metros e suporta as interfaces de carga 1194A e 1666, tal como a carenagem 4200F que tem uma altura de 9,381 metros. A carenagem 3700Z tem um diâmetro externo de 3,700 metros, uma altura de 10,796 metros e é utilizada para os lançamentos duplos no CZ-3B, suportando os suporta as interfaces de carga 1194 e 1194A.

O volume estático da carenagem é a limitação física das dimensões máximas da configuração da carga a transportar. O volume estático é determinado pela consideração das deformações estimadas a nível dinâmico e estático do conjunto carenagem / carga por uma variedade de interferências durante o voo. Os volumes variam com diferentes tipos de carenagem e adaptadores de carga. Pode-se permitir que algumas saliências na carga possam exceder o volume estático máximo (F3650 ou F3850) da secção cilíndrica da carenagem.
As estruturas das carenagens referidas são muito similares. Consistem numa abóbada, secção bicónica, secção cilíndrica e uma secção cónica invertida. A abóbada é um corpo semi-esférico com um raio de 1 metros, uma altura de 0,661 metros e um diâmetro de base de 1,890 metros. Consiste numa concha abobadada, um anel de base, um anel em encapsulamento e reforços.
A concha abobadada é uma estrutura em fibra de vidro com uma espessura de 8 mm. O anel de base, anel de encapsulamento e reforço são fabricados em ligas de alumínio de alta resistência. Uma cintura à base de borracha de sílica cobre o exterior da linha de divisão e um cinturão de borracha está comprimido entre as duas metades. Os cinturões de isolamento exterior e interior impedem a corrente de ar de entrar na carenagem durante o voo.
A parte superior da secção bicónica é um cone de 25º com uma altura de 1,400 metros e a parte inferior é um cone de 15º com uma altura de 1,500 metros. A parte superior e a parte inferior estão interligadas. O diâmetro do anel superior é de 1,890 metros e o diâmetro do anel inferior é de 4,000 metros.
A estrutura da secção cilíndrica é idêntica à da secção bicónica, isto é tem uma constituição em favos de mel de alumínio. Existem duas entradas de ar condicionado na parte superior da secção cilíndrica e 10 saídas de exaustão com uma área total de 191 cm2 na parte inferior.
A secção cónica invertida é uma estrutura reforçada monocoque. É composta por um anel superior, um anel intermédio, reforços inferiores longitudinais e cobertura com tratamento químico. Para as carenagens 4000F e 4200F, estão disponíveis portas de acesso nesta secção. Para as carenagens 4000Z e 4200Z não existem portas de acesso.
A superfície exterior da carenagem, especialmente a superfície da abóbada e da secção bicónica, sofre um aquecimento devido à corrente de ar a alta velocidade durante o lançamento. Deste modo, são adoptadas medidas que evitam o aquecimento para garantir que a temperatura na superfície interior seja inferior a 80ºC.
A superfície exterior da secção bicónica e da secção cilíndrica são cobertas por um painel de cortiça especial. O painel na secção bicónica tem uma espessura de 1,2 mm e na secção cilíndrica tem uma espessura de 1,0 mm.
O mecanismo de separação e ejecção da carenagem consiste em mecanismos de abertura laterais, mecanismo de abertura longitudinal e mecanismo de separação. Para as carenagens 4000F e 4200F o anel na base da carenagem está ligado com a secção curta dianteira do tanque criogénico do terceiro estágio por doze parafusos explosivos não contaminantes. Para as carenagens 4000Z e 4200Z a base do anel na carenagem está ligado com o topo da secção de equipamento por parafusos explosivos não contaminantes. A fiabilidade de um parafuso explosivo é de 0,9999.
O plane de separação longitudinal da carenagem é o quadrante II-IV (XOZ). O mecanismo de abertura longitudinal consiste em parafusos entalhados, mangueiras, mangueiras com cordas explosivas e detonadores, suportes dos detonadores e dois parafusos explosivos. Duas mangueiras de aço percorrem a linha de separação da carenagem. Dois detonadores não sensíveis estão fixados a cada extremidade das cordas explosivas. A quando da separação, os dois parafusos não contaminantes são detonados e cortados. Os detonadores fazem as cordas explosivas entrar em ignição, gerando-se gás a alta pressão o que leva à expansão das mangueiras de aço e à quebra dos parafusos entalhados. Nesta sequência, a carenagem separa-se em duas metades. O gás gerado fica selado nas mangueiras de aço, não havendo assim contaminação da carga.
 Uma das duas cordas explosivas pode ser detonada apenas se um dos quatro detonadores é accionado. Se uma das cordas explosivas é accionada, todos os parafusos entalhados podem ser quebrados, isto é a carenagem pode separar-se. Assim, a fiabilidade da separação longitudinal é muito elevada.
Uma das duas cordas explosivas pode ser detonada apenas se um dos quatro detonadores é accionado. Se uma das cordas explosivas é accionada, todos os parafusos entalhados podem ser quebrados, isto é a carenagem pode separar-se. Assim, a fiabilidade da separação longitudinal é muito elevada.
O mecanismo de separação da carenagem é composto por dobradiças e molas. Cada metade da carenagem é suportada por duas dobradiças que se localizam no quadrante I e III. Existem seis molas de separação colocadas em cada metade da carenagem; o máximo de força exercida por cada mola é de 37,8 kN. Após a abertura da carenagem, cada metade roda em torno de uma dobradiça. Quando a taxe de rotação da metade da carenagem é superior a 18º/s, a carenagem é ejectada. O processo cinemático é exemplificado na figura.
Podem ser incorporadas na secção bicónica da carenagem e na secção cilíndrica janelas transparentes às radiofrequências RF para fornecer ao satélite a capacidade de transmissão através da carenagem de acordo com as necessidades do utilizador. As janelas transparentes RF são fabricadas em fibra de vidro na qual a taxa de transparência é indicada na tabela em baixo.
Podem ser proporcionadas portas de acesso à secção cilíndrica para permitir um acesso limitado ao satélite após a colocação da carenagem. Algumas áreas da carenagem não podem ser seleccionadas para a localização das janelas de radiofrequência RF.

O Complexo de Lançamento
O complexo de lançamento LC2 para o foguetão Chang Zheng-3B no Centro de Lançamento de Satélites em Xichang, inclui a plataforma de lançamento, torre de serviço, torre umbilical, centro de controlo de lançamento, sistemas de abastecimento, sistemas de fornecimento de gás, sistemas de fornecimento de energia, torres de protecção contra relâmpagos, etc. Um desenho esquemático do complexo de lançamento em Xichang é apresentado na figura seguinte.

A torre de serviço é composta pela torre do guindaste, equipamento movível, plataformas, elevadores, sistema de distribuição e fornecimento de energia, condutas de abastecimento para armazenamento do propolente, detectores de incêndio e extintores. Esta torre tem uma altura de 90,60 metros. No topo da torre existem dois guindastes. A altura de levantamento efectiva é de 85 metros. A capacidade de carga é de 20.000 kg (guincho principal) e 10.000 kg (guincho suplente). Existem dois elevadores (com uma capacidade de 2.000 kg) para a elevação de pessoal e equipamentos. A torre tem plataformas para operações de verificação e operações de teste do foguetão lançador e da sua carga. A parte superior da torre é uma área limpa com ambiente controlado. O nível de limpeza é de Classe 100.000 e as temperaturas na área de operação do satélite encontram-se entre os 15 ºC e os 25 ºC. A acoplagem entre a carga e o veículo lançador, teste do satélite, encapsulamento da carenagem e outras actividades são levadas a cabo nesta área. Um guindaste superior telescópico está equipado para levar a cabo estas operações. Este guindaste pode rodar num ângulo de 180º e a sua capacidade é de 8.000 kg.
 Na torre de serviço, a Sala 812 é exclusivamente preparada para a carga. No seu interior é fornecida uma corrente eléctrica de 60Hz UPS (Fase 120V, 5kW). A resistência é menos de 1W. A área desta sala é de 8 m2. Para além de um sistema de hidratação, a torre de serviço está também equipada com pó extintor e extintores 1211.
Na torre de serviço, a Sala 812 é exclusivamente preparada para a carga. No seu interior é fornecida uma corrente eléctrica de 60Hz UPS (Fase 120V, 5kW). A resistência é menos de 1W. A área desta sala é de 8 m2. Para além de um sistema de hidratação, a torre de serviço está também equipada com pó extintor e extintores 1211.
A torre umbilical serve para fornecer ligações eléctricas, condutas de gás, condutas líquidas, bem como as ligações para o satélite e para o foguetão lançador. A torre tem um sistema de braço amovível, plataformas e condutas de abastecimento criogénico. O abastecimento do lançador é levado a cabo através das condutas criogénicas. A torre umbilical também está equipada com sistemas de ar condicionado para a carga e carenagem, um sistema RF, sistemas de comunicações, plataformas rotativas, sistemas de extinção de incêndios, etc. Os cabos de fornecimento de energia são conectados ao satélite e ao lançador através desta torre umbilical. As condutas do ar condicionado são ligadas à carenagem também através desta torre para fornecer ar limpo. A limpeza do ar condicionado é de Classe 100.000 e a temperatura encontra-se entre os 15ºC e os 25ºC, com uma humidade entre 35% e 55%. A Sala 722 da torre umbilical é exclusivamente preparada para a carga. A sua área é de 8m2 e no seu interior é fornecida uma corrente eléctrica de 60Hz/50Hz UPS (Fase 120V/220V/15A). A resistência é menos de 1W.
Centro de Controlo de Lançamento
O Centro de Controlo de Lançamento (CCL) é uma estrutura em fortim capaz de resistir a uma explosão violenta. As operações levadas a cabo na torre (tais como testes antes do lançamento, abastecimento, operações de lançamento) do foguetão lançador são controladas desde o CCL. O controlo de lançamento do satélite também pode ser levado a cabo no CCL. A sua área de construção é de 1.000 m2.
O CCL inclui as salas de teste do veículo lançador, salas de teste dos satélites, sala de controlo de abastecimento, sala de controlo de lançamento, sala de informação para o director de missão, sistema de ar condicionado, passagens de evacuação, etc. Todo o CCL recebe ar condicionado.
Existem duas salas para o teste dos satélites e cada uma tem uma área de 48,6 m2. a temperatura no interior das salas é de 20ºC com variação máxima e mínima de 5ºC. A humidade relativa é de 75%. Em cada sala existem painéis de distribuição de energia 380V/220V, 50Hz e 120V/220V, 60Hz. A resistência é menos de 1W. O satélite é conectado com o equipamento de controlo no interior da sala de teste através de cabos umbilicais.
Estão disponíveis no interior das salas sistemas de telefone e de monitorização, bem como na torre e nos restantes locais.
Centro de Controlo e Comando da Missão
O Centro de Controlo e Comando da Missão (CCCM) está localizado a 7 km do local de lançamento. Todo o edifício inclui duas partes: uma é a zona de comando e controlo e a outra é a zona de computação. A zona de comando e controlo consiste em duas áreas: a área de comando e a área de segurança. Em torno da primeira zona encontram-se salas de operação e escritórios. Existem uma sala de visitas no segundo andar e os visitantes podem observar o lançamento em ecrãs de televisão. Existem sistemas de televisão por cabo parta os visitantes.
O CCCM possui um sistema de computadores a funcionar em tempo real; um sistema de comando e controlo; levar a cabo a monitorização e fornecimento de controlo, computadores sistemas de conversão D/A e A/D, sistemas de televisão, sistemas de gravação de dados e sistemas de telecomando; sistemas de comunicação, sistemas de temporização e transmissão de dados, e equipamento de impressão e revelação de filme. O CCCM tem como funções comandar todas as operações das estações de rastreio e monitorizar a performance e estado do equipamento, levar a cabo o controlo de segurança após o lançamento, obter informações sobre os parâmetros de localização do lançador a partir de estações e processar estes dados em tempo real, fornecer a aquisição e obter dados para as estações de rastreio e para o Centro de Controlo de Satélites em Xi’an, fornecer informações à equipa de controlo e levar a cabo o processamento de dados após a missão.
Centro de Controlo, Telemetria e Detecção
O Centro de Controlo, Telemetria e Detecção (CCTD) do Centro de Lançamento de Satélites de Xichang e o CCTD do Centro de Controlo de Satélites de Xi’an, formam uma rede de Controlo, Telemetria e Detecção para cada missão. O CCTD do Centro de Lançamento de Satélites de Xichang consiste na estação de rastreio de Xichang, na estação de rastreio de Yibin e na estação de rastreio de Guiyang. O CCTD do Centro de Controlo de Satélites de Xi’an consiste na estação de rastreio de Weinan, na estação de rastreio de Xiamen e nos navios de instrumentação.
O Centro de rastreio de Xichang inclui equipamentos ópticos, radar, telemetria e telecomando. É responsável pela medição e processamento dos dados de voo do foguetão lançador e também pelo controlo da zona de segurança. Os dados recebidos e gravados pelo sistema do CCTD são utilizados para o processamento e análise após a missão.
As principais funções do CCTD são o registo dos dados iniciais de voo em tempo real, medição da trajectória do veículo lançador; recepção, gravação, transmissão e processamento dos dados e telemetria do foguetão lançador e do satélite; tomar decisões relativas à segurança; e computar o estado de separação entre o satélite e o lançador e respectivos parâmetros de injecção.
Após o lançamento o foguetão é imediatamente seguido pelo equipamento óptico, de telemetria e por radares em torno do local de lançamento. Os dados recebidos são enviado para CCCM. Estes dados serão inicialmente processados e enviados para as estações respectivas. Os computadores das estações recebem estes dados e levam a cabo a conversão de coordenadas, utilizando esses dados como dados para orientar o sistema do CCTD para obter e seguir o alvo.
Após a detecção do alvo, os dados medidos são enviados para os computadores na estação e para o CCCM para serem processados. Estes dados processados são utilizados para o controlo da segurança do voo. Os resultados das computações são enviados para o Centro de Lançamento de Satélites de Xichang e para o Centro de Controlo de Satélites de Xi’an em tempo real através de linhas de transmissão de dados.
Em caso de falha durante as fases de voo do primeiro ou segundo estágio, o oficial de segurança tomará uma decisão tendo por base os critérios de segurança.
A injecção orbital da carga é detectada pelos navios de rastreio e enviada para o Centro de Controlo de Satélites de Xi’an. Os resultados são enviados para o CCCM de Xichang para processamento e monitorização.
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5794
– Lançamento orbital China: 311 (5,37%)
– Lançamento orbital desde Xichang: 124 (2,14%)
Os próximos lançamentos orbitais previstos são (hora UTC):
08 Dez (0419:??) – Delta IV-Heavy (D381) – Vandenberg AFB, SLC-6 – NROL-17
13 Dez (0400:00) – Electron/Curie (F4) – Máhia, LC-1 – ALBus, CeREs, CHOMPTT, Da Vinci, ISX, NMTSat, RSat-P, Shields-1, STF-1, CubeSail-1, CubeSail-2, GeoStare, TOMSat Eagle Scout, TOMSat-R3 (AeroCube-11), SHFT-1
15 Dez (????:??) – CZ-4B Chang Zheng-4B (Y39) – ZY-2D Ziyuan-2D, BNU-1; Tianyi MV-1
18 Dez (0015:??) – Falcon-9 (B1054.1) – Cabo Canaveral AFS, SLC-40 – GPS-3 SV01 (Vespucci)
18 Dez (1637:??) – 372RN21A Soyuz ST-A/Fregat-M (VS20 / ????? / M133-10) – CSO 1 (Composante Spatiale Optique-1)