

A sonda Chinesa Tianwen-1 atingiu a órbita de Marte a 10 de Fevereiro de 2021, iniciando-se agora a contagem decrescente para que em Maio ou Junho se proceda ao envio de um veículo robótico para a superfície do planeta.
A manobra de travagem teve lugar às 1152:30UTC, permitindo que a sonda diminuísse a velocidade o suficiente para que fosse captada pelo campo gravitacional de Marte, terminando às 1208:12UTC. Entre as 1202:42UTC e as 1258:24UTC, a sonda esteve numa fase programada onde as comunicações não eram possíveis devido à passagem da sonda «por detrás» de Marte, e a confirmação do final da queima e consequente confirmação da entrada em órbita do planeta vermelho ocorreu pelas 1300UTC.
A missão é composta por um veículo orbitador, um veículo de descida e um veículo robótico de superfície (ou rover), e terá como objectivo estudar a topografia de Marte, o seu solo, ambiente, atmosfera e o gelo de água à superfície, bem como a estrutura interna do planeta e a busca de possíveis sinais de vida. O veículo robótico de superfície irá receber a sua designação após atingir a superfície de Marte.
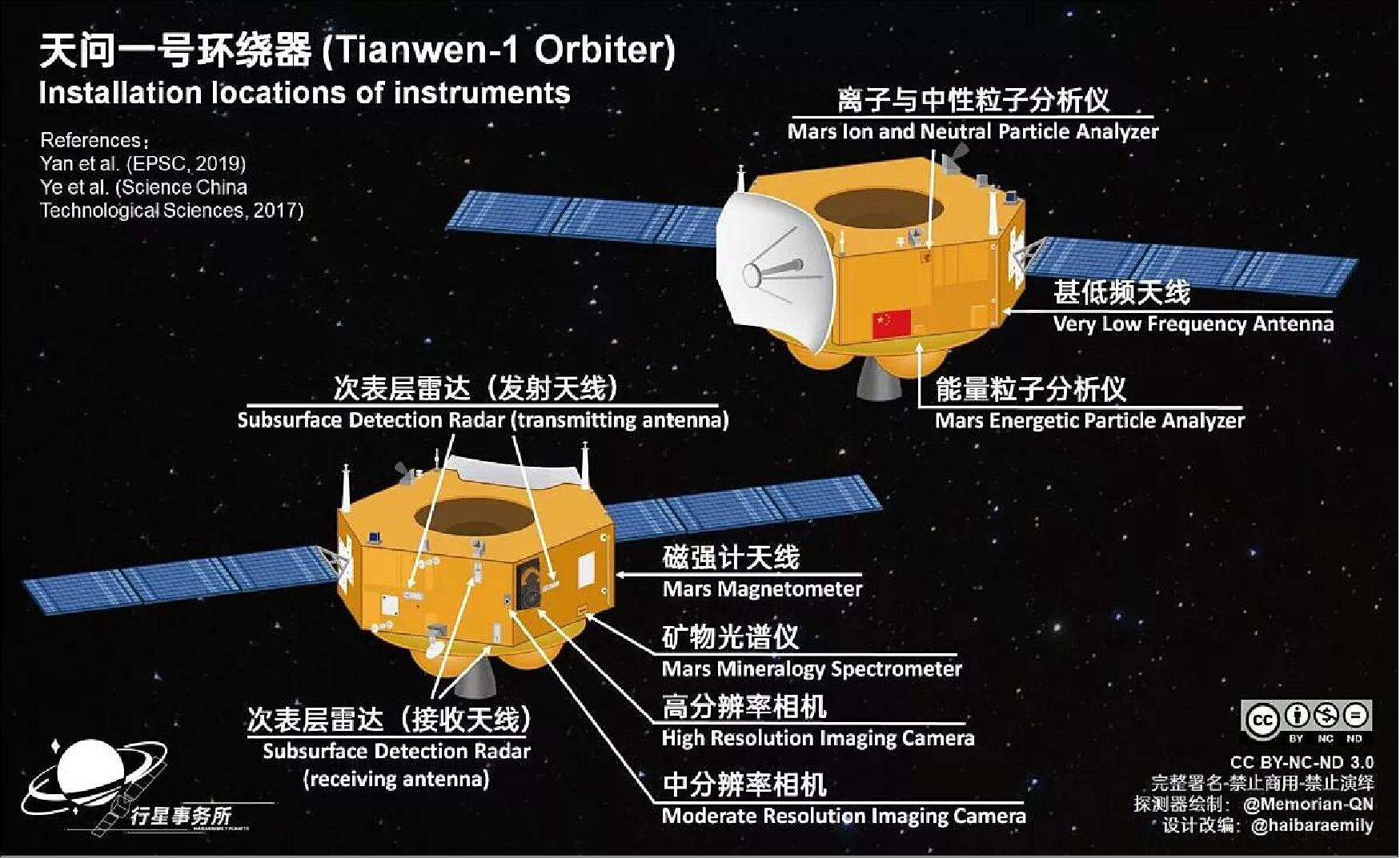
A sonda orbital transporta seis instrumentos, sendo estes: a Câmara de Média Resolução (que irá obter imagens com uma resolução de 100 metros a partir de uma órbita a 400 km de altitude); a Câmara de Alta Resolução (que irá obter imagens com uma resolução de 2 metros a partir de uma órbita a 400 km de altitude); a Câmara de Média Resolução; um Magnetómetro; um Espectrómetro de Mineralogia de Marte (que irá determinar a composição elementar da superfície); o Radar Orbital de Subsuperfície; o Analisador de Partículas Energéticas; e o Analisador de Partículas Neutras e Iónicas.
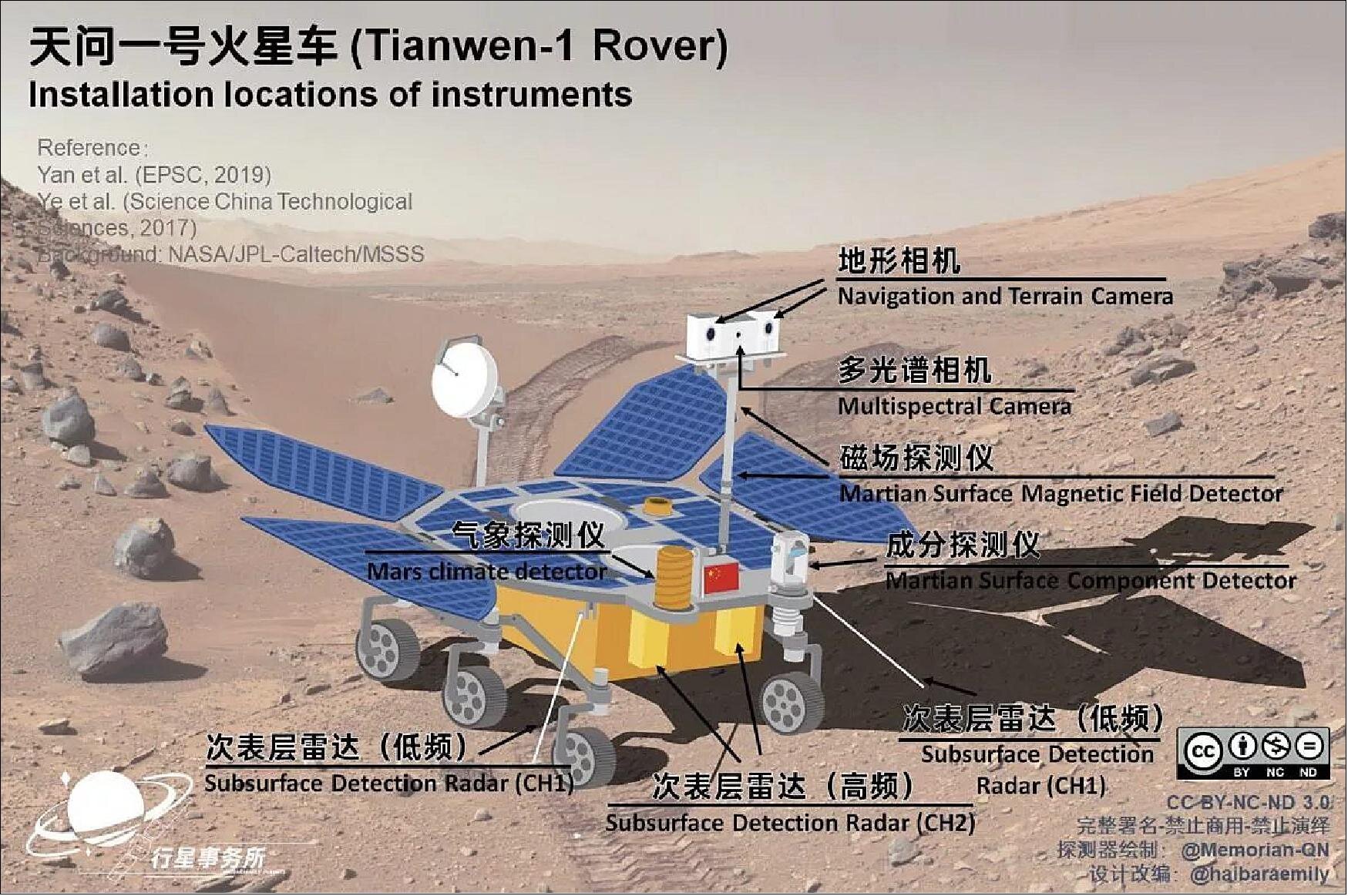
Por seu lado, o veículo robótico de superfície transporta seis instrumentos, sendo estes o Radar de Penetração de Solo (que irá analisar a estrutura da superfície até uma profundidade de 100 metros); o Detector de Campo Magnético de Superfície; o Detector de Composição de Superfície; uma Câmara Multiespectral; e uma Câmara Topográfica de Navegação.
A TW-1 passará dois a três meses a pesquisar possíveis locais de descida usando uma câmara de alta resolução para se preparar para o pouso em Maio.
A parte mais complicada da missão será o pouso suave, um processo autónomo da sonda com a duração de sete a oito minutos. A sonda usará a sua forma aerodinâmica, pára-quedas e propulsão para desacelerar e amortecer a sua descida.
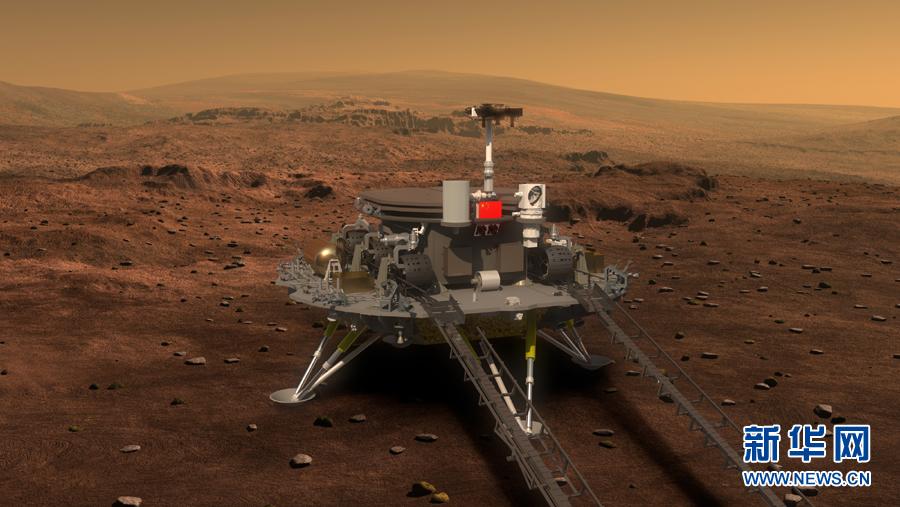
Após o pouso, o veículo robótico irá descer por uma rampa para a superfície do planeta vermelho para levar a cabo a exploração científica com uma expectativa de vida útil de pelo menos 90 dias marcianos (cerca de três meses na Terra) e o orbitador, com vida útil projectada de um ano marciano (cerca de 687 dias na Terra), retransmitirá as comunicações para o rover enquanto conduz a sua própria missão científica.
 Os engenheiros e cientistas espaciais chineses escolheram uma região relativamente plana na parte Sul da Utopia Planitia, uma grande planície, como a potencial zona de pouso. Pesquisas anteriores mostraram que o potencial local de pouso pode ser a beira de um oceano ou lago antigo no início da história de Marte. Os cientistas chineses estão ansiosos para encontrar mais evidências de gelo de água.
Os engenheiros e cientistas espaciais chineses escolheram uma região relativamente plana na parte Sul da Utopia Planitia, uma grande planície, como a potencial zona de pouso. Pesquisas anteriores mostraram que o potencial local de pouso pode ser a beira de um oceano ou lago antigo no início da história de Marte. Os cientistas chineses estão ansiosos para encontrar mais evidências de gelo de água.
A principal tarefa da missão é o de levar a cabo uma pesquisa global e aprofundada de todo o planeta utilizando o orbitador, enviando o veículo robótico para a superfície, analisando pontos de interesse científico para levar a cabo investigações detalhadas com alta precisão e resolução. Os objectivos científicos incluem mapear a morfologia e a estrutura geológica, investigar as características do solo superficial e a distribuição de água e gelo, analisar a composição do material da superfície, medir a ionosfera e as características do clima e ambiente marciano na superfície e perceber os campos físicos (electromagnético e gravitacional) e a estrutura interna de Marte.
A sonda foi construída pela Corporação de Ciência e Tecnologia Aeroespacial da China (CASC – China Aerospace Science and Technology Corporation) e a missão é gerida pelo Centro Nacional de Ciência Espacial (NSSC – National Space Science Center) em Pequim. A sonda tem uma massa de cerca de 5.000 kg, dos quais 3.175 kg correspondem ao orbitador e 240 kg correspondem ao veículo robótico de superfície.
 A Tianwen-1 foi lançada a 23 de Julho de 2020 pelo CZ-5 Chang Zheng-5 (Y4) que deixou o Complexo de Lançamento LC101 do Centro de Lançamentos Espaciais de Wenchang, Hainan, às 0441:15,167UTC.
A Tianwen-1 foi lançada a 23 de Julho de 2020 pelo CZ-5 Chang Zheng-5 (Y4) que deixou o Complexo de Lançamento LC101 do Centro de Lançamentos Espaciais de Wenchang, Hainan, às 0441:15,167UTC.
O nome Tianwen-1 (天问一号) significa “Perguntas aos Céus” e é originário de um poema escrito por Qu Yuan (cerca 340-278 AC), um dos grandes poetas da antiga China. Assim, o nome da sonda significa a perseverança da China em busca da verdade e da Ciência, explorando a Natureza e o Universo.
Até Marte
Após ter sido colocada na sua trajectória de transferência para a órbita de Marte, a Tianwen-1 levou a cabo várias manobras de correcção de trajectória.
A primeira manobra (TCM-1) teve lugar a 1 de Agosto de 2020, pelas 2300UTC, activando o seu motor de 3.000 N durante 20 segundos. Seguiu-se uma segunda manobra (TCM-2) a 20 de Setembro, pelas 1500UTC, com a activação de quatro motores de 120 N durante 20 segundos.
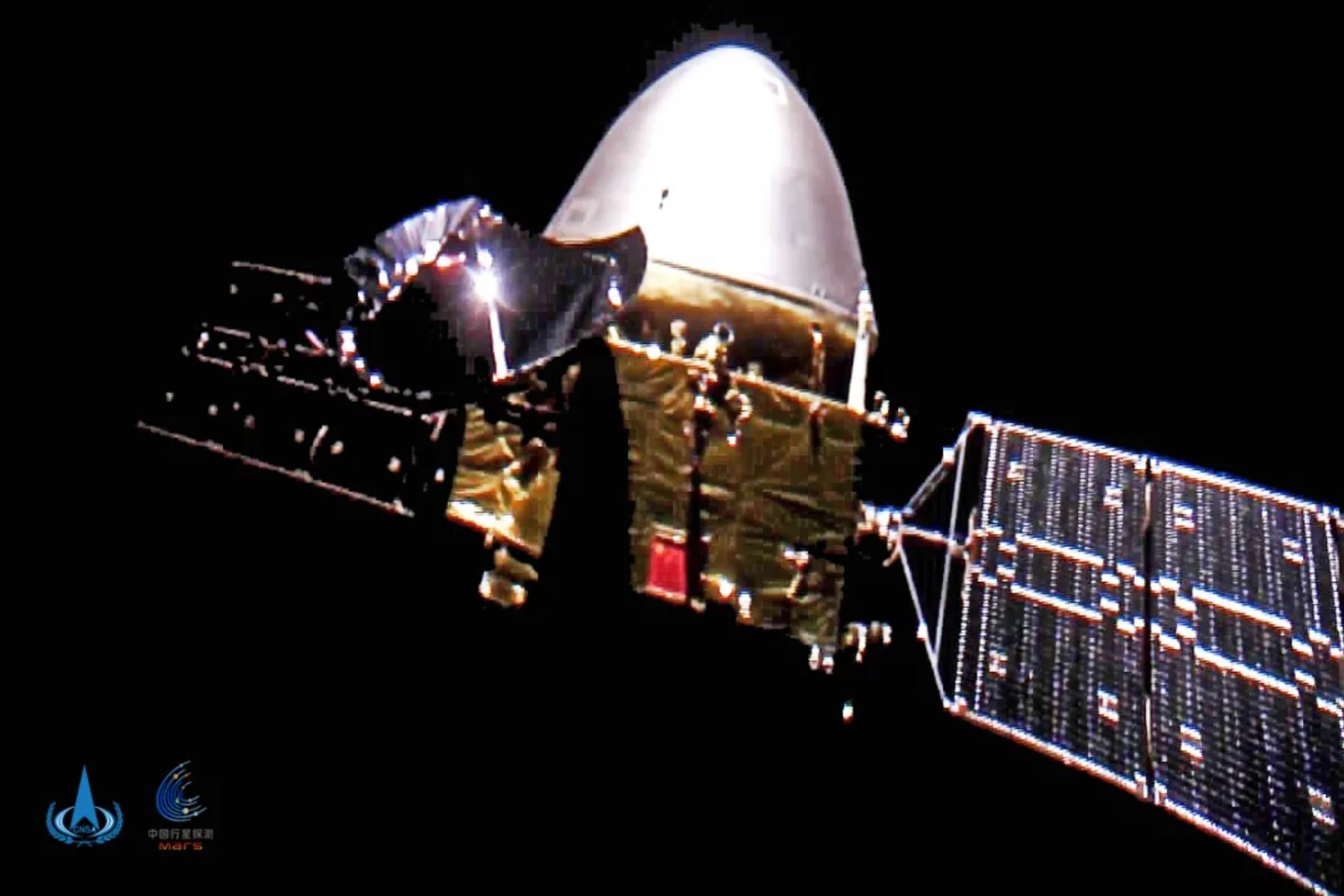
A Tianwen-1 enviaria uma fotografia de si própria a caminho de Marte a 1 de Outubro e realizava uma manobra de espaço profundo no dia 9 de Outubro, pelas 1500UTC, ao activar o seu motor de 3.000 N durante 480 segundos.
A terceira manobra (TCM-3) teve lugar a 28 de Outubro, pelas 1400UTC, activando o seu motor de 3.000 N durante 20 segundos e a quarta manobra (TCM-4) ocorreu às 1200UTC do dia 5 de Fevereiro de 2021, activando os seus oito motores de 25 N durante 12 segundos.
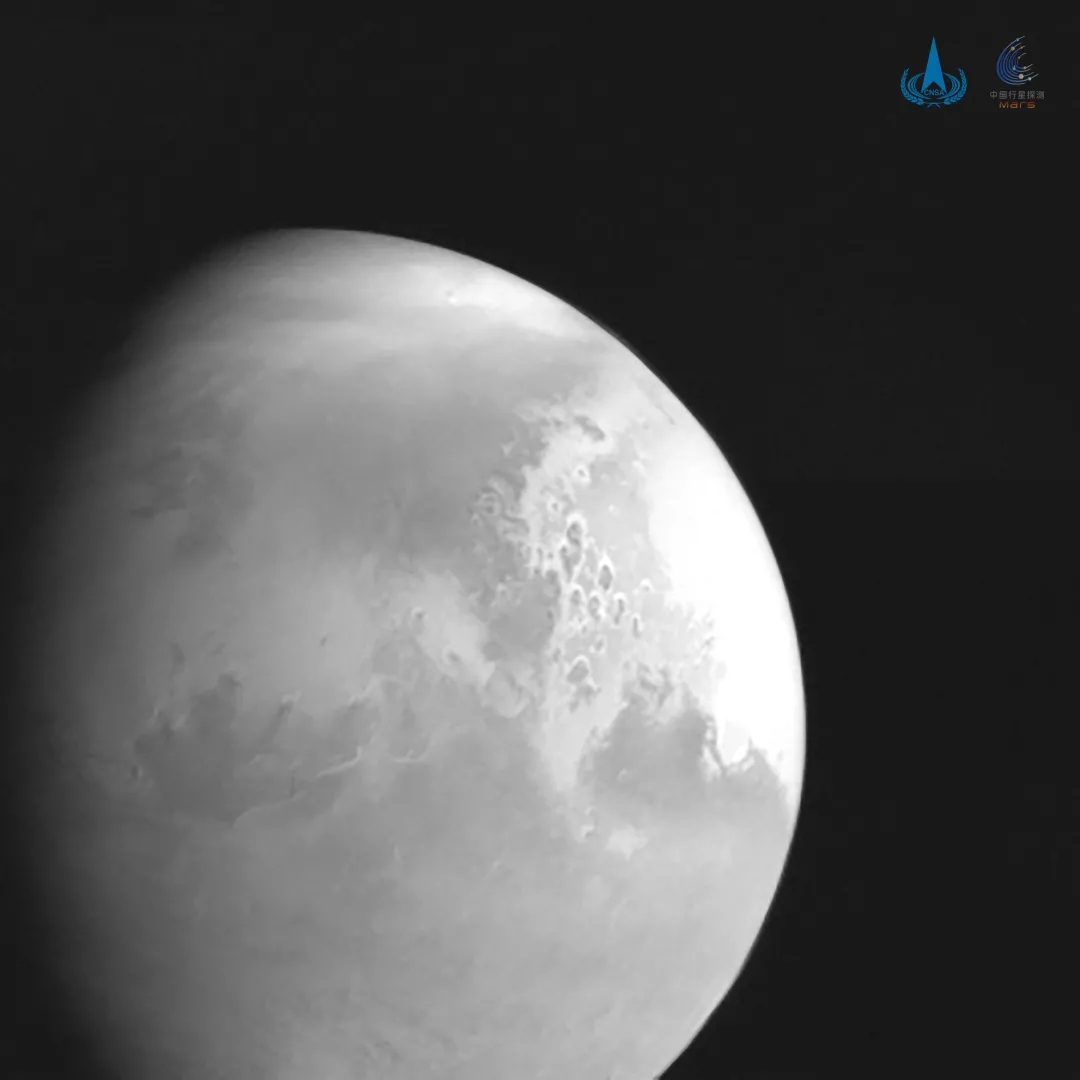
A Tianwen-1 enviou a sua primeira fotografia de Marte quando se encontrava a uma distância de 2,2 milhões de quilómetros do planeta vermelho. Altura em que levou a cabo a sua quarta manobra de correcção de trajectória para garantir os parâmetros orbitais ideais para uma posterior descida para a superfície.
Descida para a superfície
Após entrar em órbita de Marte será iniciado um processo de várias semanas que irá culminar na separação do veículo de descida que transporta o veículo robótico de superfície. Esta parte da missão terá lugar em Maio de 2021.
A entrada e descida atmosférica será uma das partes cruciais e mais arriscadas da missão. A aerodinâmica do escudo de protecção térmica da cápsula de entrada, que tem a forma de um cone esférico cuja ponta forma um ângulo de 70.º, irá fazer a desaceleração inicial à medida que atinge as camadas mais densas da atmosfera. Enquanto viaja em velocidades supersónicas, um pára-quedas será aberto para desacelerar ainda mais o veículo de descida e, em seguida, será descartado.

A retro-propulsão será responsável por desacelerar o veículo de descida durante a fase final, sendo utilizado um motor de impulso variável de 7,5 kN. Será utilizado um localizador de alcance a laser e um sensor de velocidade de micro-ondas para obter dados de navegação. O módulo de pouso irá separar-se do corpo principal do veículo de descida a uma altitude de 70 metros, entrando numa fase de flutuação para procurar um local de descida seguro. A digitalização a laser 3D, ou LIDAR, fornecerá dados sobre o terreno em baixo. O modo de evitar obstáculos, facilitado por câmaras ópticas, começará a 20 metros acima da superfície.