

Ao contrário do que estava previsto, a China levou a cabo o lançamento de um novo satélite de navegação em mais primeiro passo para finalizar a sua rede de navegação global por satélite. Anteriormente previa-se que este lançamento iria colocar em órbita dois satélites de navegação.
O lançamento do satélite Beidou-22 (Beidou-2 IGSO-6) teve lugar às 20:11:04,682UTC do dia 29 de Março de 2016 e foi levado a cabo por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites de Xichang, província de Sichuan.
Envolto no usual manto de secretismo por parte das autoridades Chinesas, o lançamento viu todas as suas fases a decorrerem sem problemas.
O novo satélite vem reforçar a cobertura regional do sistema de navegação da China, sendo colocado numa órbita geostacionária inclinada.

O actual serviço aberto (Fase II) B1 utiliza um sinal QPSK com modulação com uma largura de banda de 4,092 MHz centrada em 1561,098 MHz.
A Fase III do sistema Beidou incluí a migração do sinal civil Beidou-1, ou B1, dos 1561,098MHz para uma frequência centrada em 1575,42 MHz – a mesma que é utilizada pelos sinais civis GPS L1 e Galileo E1 – e a sua transformação de uma modulação denominada quadrature phase shift keying (QPSK) para uma modulação multiplexed binary offset carrier (MBOC) similar ao futuro sinal GPS L1C e Galileo E1.
A actual constelação Beidou de satélites geostacionários (GEO) – cinco satélites em órbitas geostacionárias inclinadas (IGSO) e quatro satélites em órbitas médias (MEO) – estão a transmitir sinais abertos e autorizados a B2 (1207,14 MHz) e um serviço autorizado a B3 (1268,52MHz).
O denominado Compass Navigation Satellite System (CNSS) é o sistema de navegação por satélite da China que foi autorizado pelo governo Chinês em 2004, sendo capaz de fornecer um serviço contínuo e em tempo real de dados de geoposicionamento tridimensionais e de velocidade.
O objectivo inicial a longo termo foi o desenvolvimento de uma rede de navegação global similar ao sistema GPS e GLONASS por volta do ano 2020, consistindo numa constelação de 35 veículos, incluindo 27 satélites MEO (órbitas de 21.500 km de altitude), 3 satélites IGSO (em órbitas geostacionárias inclinadas a 55º) e 5 satélites GSO.

Breve história do sistema Beidou/Compass
O sistema Beidou / Compass é o componente em órbita de um sistema de navegação e de posicionamento global independente por parte da China. Originalmente, o sistema seria desenvolvido ao se lançar uma constelação de satélites em vários estágios entre 2000 e 2010, desenvolvendo-se no mesmo período os sistemas de aplicações necessários. Este desenvolvimento resultaria numa indústria chinesa de navegação e posicionamento global.
 O desenvolvimento do sistema Beidou foi iniciado em 1983 com uma proposta por parte de Chen Fangyun para desenvolver um sistema regional de navegação utilizando dois satélites geostacionários, o Twinsat. Este conceito foi testado em 1989 utilizando dois satélites de comunicações DFH-2/2A. Este teste mostrou que a precisão do sistema Twinsat seria comparável ao sistema GPS norte-americano. Em 1993, o programa Beidou foi oficialmente iniciado.
O desenvolvimento do sistema Beidou foi iniciado em 1983 com uma proposta por parte de Chen Fangyun para desenvolver um sistema regional de navegação utilizando dois satélites geostacionários, o Twinsat. Este conceito foi testado em 1989 utilizando dois satélites de comunicações DFH-2/2A. Este teste mostrou que a precisão do sistema Twinsat seria comparável ao sistema GPS norte-americano. Em 1993, o programa Beidou foi oficialmente iniciado.
Os satélites Beidou utilizam o modelo DFH-3 e têm uma performance básica similar. Em 2000 dava-se o lançamento dos satélites experimentais da série e a constelação final iria consistir em quatro satélites em órbitas geossíncronas, sendo dois operacionais e dois suplentes.
O sistema de dois satélites era baseado numa determinação interactiva da altitude do utilizador. Cada um dos satélites emitia sinais de forma contínua para todas as zonas da Terra que lhe eram visíveis. A estação do utilizador faria a recepção dos sinais e transmitia-os de volta para o satélite. Por seu lado, o satélite enviava o sinal recebido para o centro de controlo do sistema. Os computadores no centro de controlo do sistema determinavam então a distância entre o utilizador e o satélite a partir do tempo que o sinal fora originalmente emitido, referenciado com o tempo de emissão, e a altura em que o sinal do utilizador havia chegado ao centro de controlo.
O centro de controlo combinava a estimativa inicial da altitude do utilizador (e por consequência a distância ao centro da Terra), a partir da última referência de altitude do utilizador ou utilizando uma estimativa arbitrária tal como o nível do mar, com as distâncias a partir destes dois satélites para obter três estimativas de distâncias para a posição do utilizador. Isto determinava a primeira estimativa da latitude e da longitude do utilizador. Um mapa da região do utilizador (possivelmente armazenado de forma digital) era então utilizado para se fazer uma estimativa melhorada da altitude do utilizador, que podia então ser associada ao cálculo da latitude e longitude para se fazer uma melhor estimativa desses valores.
Apesar do sistema ser capaz de conseguir precisões semelhantes à do sistema GPS (exceptuando em terrenos muito inclinados), tinha sérios problemas operacionais. O utilizador tinha de emitir um sinal de forma a obter uma localização e por seu lado, o centro de controlo fornecia um único alvo que poderia desactivar o sistema. Porém, era uma forma de obter, com somente dois satélites, um sistema militar de navegação próprio, independente e de grande precisão que poderia funcionar num período de guerra. Por comparação, os sistemas Navstar, GLONASS ou Galileo, requerem o lançamento de dezenas de satélites.
O Departamento de Defesa dos Estados Unidos estimou que o sistema Beidou tinha uma precisão de 20 metros em território chinês e nas áreas em redor. Foi também referido que o sistema Beidou possuía uma capacidade de comunicações activa, permitindo aos líderes nacionais o envio em segurança de ordens e receber confirmações e relatórios.
Porém, uma companhia privada, a BDStar Navigation, foi fundada para desenvolver o segmento de solo do sistema Beidou e para comercializar os receptores para os operadores comerciais. A companhia surgiu como um consórcio com a Canada Novatel em Outubro de 2000 para desenvolver e comercializar os receptores GPS. Um ano mais tarde foi finalizado um projecto para o Sistema de Serviço de Informações Beidou-1, que proporcionava a base para aplicações abertas do sistema de navegação Beidou. Um comité industrial conjunto aprovou o plano final em Janeiro de 2003.
O financiamento por parte do Ministério da Ciência e Tecnologia da China levou ao início dos trabalhos no Serviço Integrado de Aplicações de Informação de Satélite Beidou como parte do Plano de Desenvolvimento Nacional Chinês 863. O sistema passou nos testes de aceitação em Dezembro de 2005, levando a potenciais aplicações dos receptores Beidou para os navios de pesca oceânica chineses. Em Junho de 2006 foi iniciado o projecto de demonstração comercial para um Serviço de Informação de Transacções e de Produção Segura de Pesca Oceânica.
No entanto, os projectos mais lucrativos da BDStar ainda utilizavam os sinais GPS da Navstar para aplicações tais como a gestão de portos de contentores. Dado as restrições operacionais do sistema Beidou geostacionário, foi sem surpresa que a China anunciou uma constelação suplementar colocada em órbitas médias em 2006. O sistema operacional Beidou-2 era então definido como uma constelação de 35 satélites dois quais cinco operavam em órbita geossíncrona e trinta em órbitas médias (a 21.000 km de altitude e período orbital de 12 horas). Os satélites nas órbitas médias utilizariam o mesmo princípio de navegação que os sistemas Navstar, GLONASS e Galileo, com relógios internos de alta precisão e um sistema orbital de informação a enviar a posição precisa do satélite para os receptores passivos dos utilizadores. A combinação de sinais de múltiplos satélites permite ao utilizador o cálculo da sua posição na Terra com alta precisão.
A designação COMPASS aplica-se aos satélites Beidou-2 sendo estes diferenciados entre os satélites em órbita geossíncrona (COMPASS-G), em órbitas geossíncronas inclinadas (COMPASS-I) e em órbitas médias (COMPASS-M).
Os satélites iriam transmitir sinais nas frequências 1195,14 – 1219,14 MHz, 1256,52 – 1280,52 MHz, 1559,05 – 1563,15 MHz e 1587,69 – 1591,79 MHz. É interessante referir que alguns dos sinais se sobrepõem aos sinais da rede Galileu e do código GPS. Segundo Dan Levin em “Chinese Square Off With Europe in Space” (The New York Times, 23 de Março de 2009), “segundo a política da ITU (International Telecommunications Union), o primeiro país a utilizar uma frequência específica tem prioridade sobre a mesma, e os fornecedores de serviços a transmitir na mesma frequência devem garantir que as suas transmissões não interferem com o sinal autorizado previamente.”
O Sistema de Satélites de Navegação Compass (SSNC) é o sistema de navegação por satélite de segunda geração da China capaz de proporcionar um sinal contínuo de geoposicionamento tridimensional global, além de medição de velocidade. O sistema será inicialmente utilizado para fornecer serviços de posicionamento de alta precisão para os utilizadores na China e nas regiões vizinhas, cobrindo uma área de cerca de 120 graus de latitude no Hemisfério Norte. O objectivo a longo termo é o de desenvolver uma rede de navegação por satélite similar ao GPS norte-americano e ao GLONASS russo.
Dois níveis de serviço são fornecidos pelo sistema Beidou. O serviço público para utilização civil é grátis para os utilizadores chineses e tem uma precisão de 10 metros no posicionamento do utilizador, proporcionando sinais de sincronização de tempo com uma precisão de 50 ns e medição de velocidade com uma precisão de 0,2 m/s. O serviço militar é mais preciso, fornecendo informação de estado e uma capacidade de comunicação militar.
Os satélites têm uma massa média de 2.200 kg, sendo 1.100 kg a massa correspondente ao propolente. Os satélites são estabilizados nos seus três eixos espaciais. Os satélites Beidou são desenvolvidos pelo Instituto de Pesquisa de Tecnologia Espacial do Grupo de Ciência e Tecnologia Espacial da China.
Em Janeiro de 2009 a China anunciava que o seu sistema independente de posicionamento e navegação deverá estar completo em 2015 com um total de trinta satélites, dez dos quais deveriam ser lançados entre 2009 e 2010. No entanto estes planos tiveram de ser alterados devido a problemas técnicos registados no satélite Compass-G2 bem como devido ao problemas com o foguetão lançador CZ-3B Chang Zheng-3B que a 31 de Agosto de 2009 registava um problema a quando do lançamento do satélite de comunicações indonésio Palapa-D. De salientar que existem inúmeros sistemas comuns entre o CZ-3B e o CZ-3C Chang Zheng-3C.
O primeiro satélite do sistema foi lançado a 30 de Outubro de 2000. O Beidou-1A foi colocado em órbita por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xi Chang. O satélite foi colocado numa órbita inicial de transferência para a órbita geossíncrona com um apogeu a 41.889 km, perigeu a 195 km e inclinação orbital de 25,0º, antes de ficar colocado na sua órbita definitiva a 6 de Novembro, ficando estacionado a 140º longitude Este.
O Beidou-1B era lançado a 20 de Dezembro de 2000 por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xichang. O satélite foi colocado numa órbita inicial de transferência para a órbita geossíncrona com um apogeu a 41.870 km, perigeu a 190 km e inclinação orbital de 25,0º. O lançamento deste satélite completou o sistema protótipo de dois satélites que deveria fornecer a informação de posicionamento para os serviços de transporte de caminho-de-ferro, auto-estradas e de navegação marítima. O satélite foi posteriormente posicionado na órbita geossíncrona a 80º longitude Este.
O primeiro satélite suplente, o Beidou-1C, foi lançado a 24 de Maio de 2003 por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xi Chang. O Beidou-1C foi colocado na órbita geossíncrona a 110º longitude Este. A 2 de Fevereiro de 2007 era lançado o BeiDou-1D por um foguetão CZ-3A Chang Zheng-3A a partir do Complexo de Lançamento LC2 do Centro de Lançamento de Satélites Xichang. Este satélite não atingiu a órbita geossíncrona até Abril do mesmo ano devido a problemas na abertura dos seus painéis solares. Fontes militares norte-americanas referiram também a existência de uma nuvem de detritos na altura em que o satélite deveria operar o seu motor de impulso para o apogeu.
O foguetão CZ-3A Chang Zheng-3A
O foguetão lançador CZ-3A Chang Zheng-3A (长征三号甲火箭) é um veículo a três estágios de propulsão líquida cujo projecto foi iniciado em meados dos anos 80 pela Academia Chinesa de Tecnologia de Foguetões Lançadores. O seu terceiro estágio consome propulsores criogénicos. O foguetão tem um comprimento total de 55,81 metros e sua massa no lançamento é de 241.000 kg, sendo capaz de colocar 2.600 kg numa órbita de transferência para a órbita geossíncrona.
Em comparação com o CZ-3 Chang Zheng-3, o CZ-3A melhora de forma considerável a sua performance e é capaz de duplicar a capacidade de carga na órbita geossíncrona, possuindo um primeiro e segundo estágio melhorado e um terceiro estágio de maiores dimensões. Este foi totalmente redesenhado para ser equipado com o motor YF-75. Em relação ao CZ-3, possui um novo sistema digital avançado. O desenvolvimento do motor YF-75 demorou cinco anos e foi levado a cabo numa fábrica aberta que não impedia a entrada do ar gelado no Inverno e do calor tórrido do Verão.
 O sistema do CZ-3A é composto pela estrutura do foguetão lançador, sistema de propulsão, sistema de controlo, sistema de telemetria, sistema de rastreio e segurança, sistema de controlo de atitude e de gestão de propolente na fase orbital não propulsiva, sistema de utilização de propolente criogénico, sistema de separação e sistema auxiliar. A estrutura do foguetão actua de forma a suportar as várias cargas internas e externas no lançador durante o transporte, elevação (colocação na plataforma de lançamento) e voo. A estrutura do foguetão também combina todos os subsistemas em conjunto. A estrutura do foguetão é composta pelo primeiro estágio, segundo estágio, terceiro estágio e carenagem de protecção. A figura na página seguinte mostra a configuração do foguetão CZ-3A Chang Zheng-3A. O primeiro estágio é composto pela secção inter-estágio, tanque de oxidante, inter-tanque, tanque de combustível, secção posterior, secção de cauda, válvulas e condutas, etc. O segundo estágio é composto pelo tanque de oxidante, inter-tanque, tanque de combustível, válvulas e condutas, etc. O terceiro estágio contém o adaptador de carga, secção de equipamento e tanques de propolente criogénico. O adaptador de carga faz a ligação física entre a carga e o foguetão CZ-3A e reparte as cargas entre
O sistema do CZ-3A é composto pela estrutura do foguetão lançador, sistema de propulsão, sistema de controlo, sistema de telemetria, sistema de rastreio e segurança, sistema de controlo de atitude e de gestão de propolente na fase orbital não propulsiva, sistema de utilização de propolente criogénico, sistema de separação e sistema auxiliar. A estrutura do foguetão actua de forma a suportar as várias cargas internas e externas no lançador durante o transporte, elevação (colocação na plataforma de lançamento) e voo. A estrutura do foguetão também combina todos os subsistemas em conjunto. A estrutura do foguetão é composta pelo primeiro estágio, segundo estágio, terceiro estágio e carenagem de protecção. A figura na página seguinte mostra a configuração do foguetão CZ-3A Chang Zheng-3A. O primeiro estágio é composto pela secção inter-estágio, tanque de oxidante, inter-tanque, tanque de combustível, secção posterior, secção de cauda, válvulas e condutas, etc. O segundo estágio é composto pelo tanque de oxidante, inter-tanque, tanque de combustível, válvulas e condutas, etc. O terceiro estágio contém o adaptador de carga, secção de equipamento e tanques de propolente criogénico. O adaptador de carga faz a ligação física entre a carga e o foguetão CZ-3A e reparte as cargas entre  ambos. O anel da interface no topo do adaptador pode ser uma das interfaces standard internacionais 937B, 1194, 1194A ou 1666. A secção de equipamento é uma placa circular metálica fabricada pelo método de favos de colmeia e com estruturas de reforço. Aqui encontram-se os sistemas aviónicos do lançador. O tanque de propolente do terceiro estágio é termicamente isolado com um anteparo comum, tendo uma forma convexa superior no meio. O anteparo comum possui uma dupla camada térmica isoladora em vácuo. O hidrogénio líquido é abastecido na parte superior do tanque e o oxigénio líquido é armazenado na parte inferior.
ambos. O anel da interface no topo do adaptador pode ser uma das interfaces standard internacionais 937B, 1194, 1194A ou 1666. A secção de equipamento é uma placa circular metálica fabricada pelo método de favos de colmeia e com estruturas de reforço. Aqui encontram-se os sistemas aviónicos do lançador. O tanque de propolente do terceiro estágio é termicamente isolado com um anteparo comum, tendo uma forma convexa superior no meio. O anteparo comum possui uma dupla camada térmica isoladora em vácuo. O hidrogénio líquido é abastecido na parte superior do tanque e o oxigénio líquido é armazenado na parte inferior.
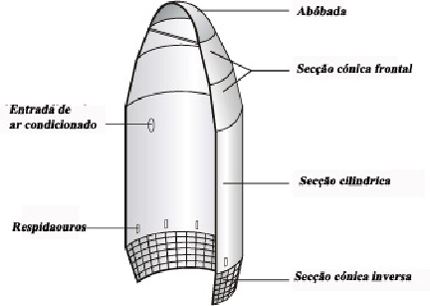
A carenagem é composta por uma abóbada, secção bicónica, secção cilíndrica e secção cónica invertida.
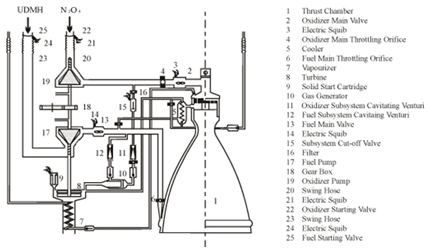
O sistema de propulsão, incluindo motores e sistema de fornecimento / pressurização, gera a força dianteira e de controlo necessária para o voo. O primeiro estágio e o segundo estágio, utilizam propolentes armazenáveis, isto é tetróxido de azoto (N2O4) e dimetil hidrazina assimétrica (UDMH). Os tanques de propolente são pressurizados pelos sistemas de propulsão regenerativos. Existem quatro motores em paralelo no primeiro estágio. Os motores podem ser orientados em direcções tangenciais. A força de cada motor é de 740,4 kN. Os quatro sistemas de propulsão utilizam os mesmos motores. Existe um motor principal e quatro motores vernier no segundo estágio. A força total é de 789,1 kN.
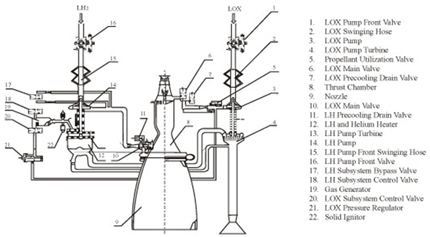
 O terceiro estágio utiliza propolentes criogénicos, isto é hidrogénio líquido (LH2) e oxigénio líquido (LOX). Dois motores universais em suspensões Cardan proporcionam uma força total de 157 kN. O rácio de expansão dos motores é de 80:1 e o impulso específico é de 4.312 Ns/kg. O tanque de LH2 é pressurizado por hélio e por um sistema regenerador, e o tanque de LOX é pressurizado por hélio aquecido e por um sistema regenerador.
O terceiro estágio utiliza propolentes criogénicos, isto é hidrogénio líquido (LH2) e oxigénio líquido (LOX). Dois motores universais em suspensões Cardan proporcionam uma força total de 157 kN. O rácio de expansão dos motores é de 80:1 e o impulso específico é de 4.312 Ns/kg. O tanque de LH2 é pressurizado por hélio e por um sistema regenerador, e o tanque de LOX é pressurizado por hélio aquecido e por um sistema regenerador.
O sistema de controlo é utilizado para manter a estabilidade do voo do lançador e para levar a cabo a navegação e / ou orientação segundo o programa de voo pré-estabelecido. O sistema de controlo consiste de uma unidade de orientação, sistema de controlo de atitude, sequenciador, distribuição de energia, etc. O sistema de controlo adopta uma plataforma inercial de quatro eixos, computador de bordo e dispositivos digitais de controlo de atitude. Algumas tecnologias avançadas são aplicadas no sistema de controlo, tais como sequenciadores electrónicos programáveis, decoplagem de três canais, controlo de duplo parâmetro e compensação em tempo real para erros de medição. Estas tecnologias tornam o lançador muito flexível para várias missões.
O sistema de telemetria funciona para medir e transmitir alguns parâmetros dos sistemas do lançador. Alguns dados medidos podem ser processados em tempo real. O sistema de telemetria recebe energia tendo em conta a distribuição dos sensores e codificação dos dados. As medições dos sinais de comando são digitalizadas. O fornecimento de energia e os testes são levados a cabo de forma automática. Os conversores digitais a bordo são inteligentes e cerca de 700 parâmetros são medidos.
O sistema de rastreio e de segurança mede os dados da trajectória e parâmetros de injecção orbital finais. O sistema também fornece informação para meios de segurança. A auto-destruição do foguetão lançador seria levada a cabo de forma remota caso ocorresse alguma anomalia em voo. O desenho da medição de trajectória e de segurança são integrados em conjunto.
O sistema de controlo de atitude e de gestão de propolente na fase de voo não propulsionada leva a cabo o controlo de atitude e gestão de propolente em órbita e reorienta o lançador antes da separação da carga. Um motor alimentado por hidrazina em pressão trabalha de forma intermitente neste sistema que pode ser accionado repetidamente segundo os comandos recebidos.
O sistema de utilização dos propolentes criogénicos mede em tempo real o nível de propolentes no interior dos tanques do terceiro estágio e ajusta o nível de consumo de oxigénio líquido para tornar os propolentes residuais numa proporção óptima. O ajustamento é utilizado para compensar o desvio da performance do motor, estrutura da massa, carga de propolente, etc., para o propósito de se obter uma maior capacidade de lançamento. O sistema contém um processador, sensores de nível de propolente e válvulas de ajustamento. Os seguintes esquemas representam a estrutura dos sistemas de propulsão do primeiro, segundo e terceiro estágios.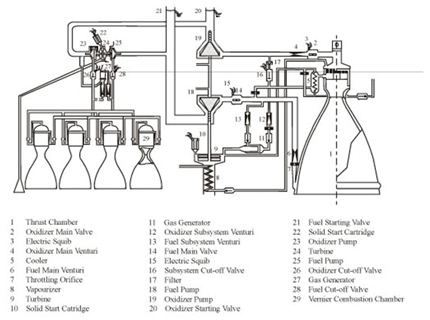
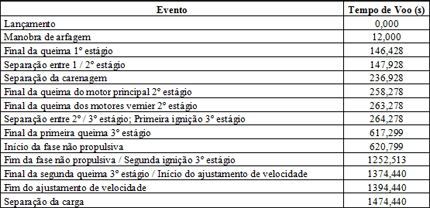
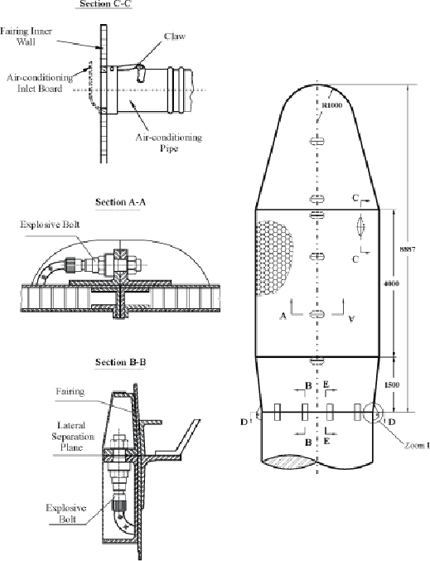
Durante a fase de voo do CZ-3A Chang Zheng-3A existem quatro eventos de separação: a separação entre o primeiro e o segundo estágio, a separação entre o segundo e o terceiro estágio, a separação da carenagem e a separação entre a carga e o terceiro estágio. A separação entre o primeiro e o segundo estágio é uma separação a quente, isto é o segundo estágio entra em ignição em primeiro lugar e depois o primeiro estágio é separado com a força dos gases de exaustão após o accionamento de 14 parafusos explosivos. A separação entre o segundo e o terceiro estágio é uma separação a frio. Os parafusos explosivos são accionados em primeiro lugar e depois pequenos retro-foguetões no segundo estágio são accionados para gerar a força de separação. Durante a separação da carenagem, os parafusos explosivos que ligam a carenagem e o terceiro estágio são accionados em primeiro lugar e depois todos os dispositivos pirotécnicos que ligam as duas metades da carenagem são accionados, com a carenagem a ser separada longitudinalmente. A carenagem volta-se para fora apoiada em dobradiças devido à força exercida por molas. Finalmente, na separação entre a carga e o terceiro estágio a carga está fixa com o lançador ao longo de uma banda de fixação. Após a separação, a carga é empurrada pela acção de molas.
O sistema auxiliar funciona antes do lançamento e inclui unidades de monitorização e de medição no solo tais como verificação do nível de abastecimento de propolente e temperatura, medição da estanquicidade, fornecimento de ar condicionado para a carenagem de protecção, etc.
O sistema de coordenadas do foguetão lançador (OXYZ) tem origem no centro de massa instantâneo do veículo, isto é no centro de massa integrado da combinação carga / veículo lançador, incluindo o adaptador, propolentes e carenagem, etc., caso seja aplicável. O eixo OX coincide com o eixo longitudinal do foguetão. O eixo OY é perpendicular ao eixo OX e estão no interior do plano de lançamento 180º para lá do azimute de lançamento. Os eixos OX, OY e OZ formam um sistema ortogonal que segue a regra da mão direita.
A atitude de voo do eixo do veículo lançador está definida na figura ao lado. O fabricante do satélite define o sistema de coordenadas do satélite. A relação ou orientação entre o veículo lançador e os sistemas do satélite serão determinados ao longo da coordenação técnica para projectos específicos.
Missões que podem ser realizadas pelo CZ-3A
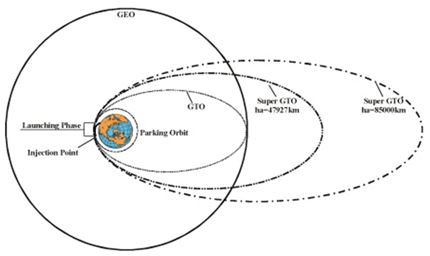
O foguetão CZ-3A Chang Zheng-3A é um veículo potente e versátil que é capaz de levar a cabo as seguintes missões: a) Transportar cargas para órbitas de transferência para a órbita geossíncrona (GTO). Esta será a função primária do CZ-3A e o objectivo da sua concepção. Após a separação do CZ-3A, o satélite irá transferir-se da órbita GTO para a órbita geossíncrona GEO). Esta é a órbita operacional na qual o período orbital do satélite coincide com o período de rotação da Terra, 24 horas, e o plano orbital coincide com o plano do equador (ver figura em baixo); b) Injectar cargas numa órbita terrestre baixa (LEO) localizada abaixo de uma altitude média de 2.000 km; c) Injectar cargas em órbitas sincronizadas com o Sol (SSO). O plano destas órbitas encontra-se ao longo da direcção de rotação do eixo de rotação da Terra ou aponta para a rotação da Terra em torno do Sol. A velocidade angular do satélite é igual à velocidade angular média da Terra em torno do Sol; d) Lançar sondas espaciais para lá do campo gravitacional da Terra.
Descrição da missão do CZ-3A
O CZ-3A é principalmente utilizado para missões para a órbita GTO, sendo a GTO standard recomendada ao utilizador do veículo. O CZ-3A coloca a carga numa GTO standard com os seguintes parâmetros a partir de Xichang: altitude do perigeu – 200 km; altitude do apogeu – 35.958,2 km, inclinação 28,5º; argumento do perigeu – 179,6º (estes parâmetros representam a órbita instantânea a quando da separação do satélite do terceiro estágio; A altitude do perigeu é equivalente a uma altitude real de 35.786 km na passagem do primeiro perigeu devido a perturbações causadas pela forma oblatada da Terra). Os quadros seguintes mostram a sequência de voo típica do CZ-3C Chang Zheng-3A.

As carenagens do CZ-3A
 A carga está protegida por uma carenagem que a isola de várias interferências da atmosfera, que inclui correntes de ar de alta velocidade, cargas aerodinâmicas, aquecimento aerodinâmico e ruídos acústicos, etc., enquanto que o lançador ascende através da atmosfera. A carenagem proporciona assim à carga um bom meio ambiente.
A carga está protegida por uma carenagem que a isola de várias interferências da atmosfera, que inclui correntes de ar de alta velocidade, cargas aerodinâmicas, aquecimento aerodinâmico e ruídos acústicos, etc., enquanto que o lançador ascende através da atmosfera. A carenagem proporciona assim à carga um bom meio ambiente.
O aquecimento aerodinâmico é absorvido ou isolado pela carenagem. A temperatura no interior da carenagem é controlada dentro dos limites estabelecidos. Os ruídos acústicos gerados por correntes de ar e pelos motores do lançador são reduzidos para níveis permitidos para a respectiva carga.
 A carenagem é separada e ejectada quando o foguetão lançador voa fora da atmosfera. A altura exacta da separação da carenagem é determinada pelo requisito de que o fluxo de calor aerodinâmico na separação da carenagem seja inferior a 1.135 W/m2.
A carenagem é separada e ejectada quando o foguetão lançador voa fora da atmosfera. A altura exacta da separação da carenagem é determinada pelo requisito de que o fluxo de calor aerodinâmico na separação da carenagem seja inferior a 1.135 W/m2.
Vinte e dois tipos de testes foram levados a cabo no desenvolvimento da carenagem do CZ-3A, incluindo testes em túneis de voo, testes térmicos, testes acústicos, testes de separação, testes de análise de modelos, testes de resistência, etc.
O volume estático da carenagem é a limitação física das dimensões máximas da configuração da carga a transportar. O volume estático é determinado pela consideração das deformações estimadas a nível dinâmico e estático do conjunto carenagem / carga por uma variedade de interferências durante o voo. Os volumes variam com diferentes tipos de carenagem e adaptadores de carga. Pode-se permitir que algumas saliências na carga possam exceder o volume estático máximo da secção cilíndrica da carenagem.
A estrutura da carenagem consiste numa abóbada, secção bicónica, secção cilíndrica e uma secção cónica invertida. A abóbada é um corpo semi-esférico com um raio de 1 metros, uma altura de 0,740 metros e um diâmetro de base de 1,930 metros. Consiste numa concha abobadada, um anel de base, um anel em encapsulamento e reforços.
A concha abobadada é uma estrutura em fibra de vidro com uma espessura de 8 mm. O anel de base, anel de encapsulamento e reforço são fabricados em ligas de alumínio de alta resistência. Uma cintura à base de borracha de sílica cobre o exterior da linha de divisão e um cinturão de borracha está comprimido entre as duas metades. Os cinturões de isolamento exterior e interior impedem a corrente de ar de entrar na carenagem durante o voo.
A parte superior da secção bicónica é um cone de 15º com uma altura de 2,647 metros e a parte inferior é um cone de 15º com uma altura de 1,500 metros. A parte superior e a parte inferior estão interligadas. O diâmetro do anel superior é de 1,930 metros e o diâmetro do anel inferior é de 3,350 metros. A estrutura da secção cilíndrica é idêntica à da secção bicónica, isto é tem uma constituição em favos de mel de alumínio.
 A secção cónica invertida é uma estrutura reforçada monocoque. É composta por um anel superior, um anel intermédio, reforços inferiores longitudinais e cobertura com tratamento químico. Estão disponíveis várias portas de acesso nesta secção.
A secção cónica invertida é uma estrutura reforçada monocoque. É composta por um anel superior, um anel intermédio, reforços inferiores longitudinais e cobertura com tratamento químico. Estão disponíveis várias portas de acesso nesta secção.
A superfície exterior da carenagem, especialmente a superfície da abóbada e da secção bicónica, sofre um aquecimento devido à corrente de ar a alta velocidade durante o lançamento. Deste modo, são adoptadas medidas que evitam o aquecimento para garantir que a temperatura na superfície interior seja inferior a 80ºC.
A superfície exterior da secção bicónica e da secção cilíndrica são cobertas por um painel de cortiça especial. O painel na secção bicónica tem uma espessura de 1,2 mm e na secção cilíndrica tem uma espessura de 1,0 mm.
O mecanismo de separação e ejecção da carenagem consiste em mecanismos de abertura laterais, mecanismo de abertura longitudinal e mecanismo de separação, accionados por molas e ganchos.
Cada metade da carenagem é suportada por dois ganchos que estão localizados nos quadrantes I e III. Existem quatro molas de separação em cada metade da carenagem, act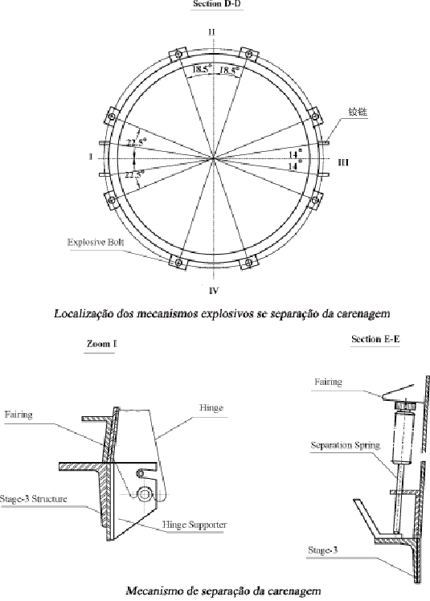 uando com um máximo de força de 37,8 kN. Após a separação, cada metade roda sobre uma dobradiça. Quando o ângulo de rotação é superior a 18º/s, dá-se a separação da metade da carenagem.
uando com um máximo de força de 37,8 kN. Após a separação, cada metade roda sobre uma dobradiça. Quando o ângulo de rotação é superior a 18º/s, dá-se a separação da metade da carenagem.
O mecanismo de separação da carenagem é composto por dobradiças e molas. Cada metade da carenagem é suportada por duas dobradiças que se localizam no quadrante I e III. Existem seis molas de separação colocadas em cada metade da carenagem; o máximo de força exercida por cada mola é de 37,8 kN. Após a abertura da carenagem, cada metade roda em torno de uma dobradiça. Quando a taxe de rotação da metade da carenagem é superior a 18º/s, a carenagem é ejectada. O processo cinemático é exemplificado a seguir.
Podem ser incorporadas na secção bicónica da carenagem e na secção cilíndrica janelas transparentes às radiofrequências RF para fornecer ao satélite a capacidade de transmissão através da carenagem de acordo com as necessidades do utilizador. As janelas transparentes RF são fabricadas em fibra de vidro na qual a taxa de transparência é indicada na tabela ao lado.
Podem ser proporcionadas portas de acesso à secção cilíndrica para permitir um acesso limitado ao satélite após a colocação da carenagem. Algumas áreas da carenagem não podem ser seleccionadas para a localização das janelas de radiofrequência RF.
O Complexo de Lançamento
O complexo de lançamento para o foguetão Chang Zheng-3A no Centro de Lançamento de Satélites em Xichang, inclui as plataformas de lançamento, torres de serviço, torres umbilical, centro de controlo de lançamento, sistemas de abastecimento, sistemas de fornecimento de gás, sistemas de fornecimento de energia, torres de protecção contra relâmpagos, etc.
As torres de serviço são compostas pelas torres do guindaste, equipamento movível, plataformas, elevadores, sistema de distribuição e fornecimento de energia, condutas de abastecimento para armazenamento do propolente, detectores de incêndio e extintores.
As torres têm uma altura de 90,60 metros. No topo das torres existem dois guindastes. A altura de levantamento efectiva é de 85 metros. A capacidade de carga é de 20.000 kg (guincho principal) e 10.000 kg (guincho suplente). Existem dois elevadores (com uma capacidade de 2.000 kg) para a elevação de pessoal e equipamentos. As torres têm plataformas para operações de verificação e operações de teste do foguetão lançador e da sua carga.
A parte superior das torres é uma área limpa com ambiente controlado. O nível de limpeza é de Classe 100.000 e as temperaturas na área de operação do satélite encontram-se entre os 15 ºC e os 25 ºC. A acoplagem entre a carga e o veículo lançador, teste do satélite, encapsulamento da carenagem e outras actividades são levadas a cabo nesta área. Um guindaste superior telescópico está equipado para levar a cabo estas operações. Este guindaste pode rodar num ângulo de 180º e a sua capacidade é de 8.000 kg. Nas torres de serviço, a Sala 812 é exclusivamente preparada para a carga. No seu interior é fornecida uma corrente eléctrica de 60Hz UPS (Fase 120V, 5kW). A resistência é menos de 1?. A área desta sala é de 8 m2. Para além de um sistema de hidratação, as torres de serviço estão também equipadas com pó extintor e extintores 1211.
As torres umbilicais servem para fornecer ligações eléctricas, condutas de gás, condutas líquidas, bem como as ligações para o satélite e para o foguetão lançador. As torres têm um sistema de braço amovível, plataformas e condutas de abastecimento criogénico. O abastecimento do lançador é levado a cabo através das condutas criogénicas. As torres umbilicais também estão equipadas com sistemas de ar condicionado para a carga e carenagem, um sistema RF, sistemas de comunicações, plataformas rotativas, sistemas de extinção de incêndios, etc. Os cabos de fornecimento de energia são conectados ao satélite e ao lançador através destas torres umbilicais. As condutas do ar condicionado são ligadas à carenagem também através desta torre para fornecer ar limpo. A limpeza do ar condicionado é de Classe 100.000 e a temperatura encontra-se entre os 15ºC e os 25ºC, com uma humidade entre 35% e 55%. A Sala 722 das torres umbilicais é exclusivamente preparada para a carga. A sua área é de 8m2 e no seu interior é fornecida uma corrente eléctrica de 60Hz/50Hz UPS (Fase 120V/220V/15A).
Centro de Controlo de Lançamento
O Centro de Controlo de Lançamento (CCL) é uma estrutura em fortim capaz de resistir a uma explosão violenta. As operações levadas a cabo na torre (tais como testes antes do lançamento, abastecimento, operações de lançamento) do foguetão lançador são controladas desde o CCL. O controlo de lançamento do satélite também pode ser levado a cabo no CCL. A sua área de construção é de 1.000 m2.
O CCL inclui as salas de teste do veículo lançador, salas de teste dos satélites, sala de controlo de abastecimento, sala de controlo de lançamento, sala de informação para o director de missão, sistema de ar condicionado, passagens de evacuação, etc. Todo o CCL recebe ar condicionado.
Existem duas salas para o teste dos satélites e cada uma tem uma área de 48,6 m2. A temperatura no interior das salas é de 20ºC com variação máxima e mínima de 5ºC. A humidade relativa é de 75%. Em cada sala existem painéis de distribuição de energia 380V/220V, 50Hz e 120V/220V, 60Hz. O satélite é conectado com o equipamento de controlo no interior da sala de teste através de cabos umbilicais. Estão disponíveis no interior das salas sistemas de telefone e de monitorização, bem como na torre e nos restantes locais.
Centro de Controlo e Comando da Missão
O Centro de Controlo e Comando da Missão (CCCM) está localizado a 7 km do local de lançamento. Todo o edifício inclui duas partes: uma é a zona de comando e controlo e a outra é a zona de computação. A zona de comando e controlo consiste em duas áreas: a área de comando e a área de segurança. Em torno da primeira zona encontram-se salas de operação e escritórios. Existem uma sala de visitas no segundo andar e os visitantes podem observar o lançamento em ecrãs de televisão. Existem sistemas de televisão por cabo parta os visitantes.
O CCCM tem como funções comandar todas as operações das estações de rastreio e monitorizar a performance e estado do equipamento, levar a cabo o controlo de segurança após o lançamento, obter informações sobre os parâmetros de localização do lançador a partir de estações e processar estes dados em tempo real, fornecer a aquisição e e obter dados para as estações de rastreio e para o Centro de Controlo de Satélites em Xi’an, fornecer informações à equipa de controlo e levar a cabo o processamento de dados após a missão.
O CCCM possui um sistema de computadores a funcionar em tempo real; um sistema de comando e controlo; levar a cabo a monitorização e fornecimento de controlo, computadores sistemas de conversão D/A e A/D, sistemas de televisão, sistemas de gravação de dados e sistemas de telecomando; sistemas de comunicação, sistemas de temporização e transmissão de dados, e equipamento de impressão e revelação de filme.
Centro de Controlo, Telemetria e Detecção
O Centro de Controlo, Telemetria e Detecção (CCTD) do Centro de Lançamento de Satélites de Xichang e o CCTD do Centro de Controlo de Satélites de Xi’an, formam uma rede de Controlo, Telemetria e Detecção para cada missão. O CCTD do Centro de Lançamento de Satélites de Xichang consiste na estação de rastreio de Xichang, na estação de rastreio de Yibin e na estação de rastreio de Guiyang. O CCTD do Centro de Controlo de Satélites de Xi’an consiste na estação de rastreio de Weinan, na estação de rastreio de Xiamen e nos navios de instrumentação.
O Centro de rastreio de Xichang inclui equipamentos ópticos, radar, telemetria e telecomando. É responsável pela medição e processamento dos dados de voo do foguetão lançador e também pelo controlo da zona de segurança. Os dados recebidos e gravados pelo sistema do CCTD são utilizados para o processamento e análise após a missão.
As principais funções do CCTD são o registo dos dados iniciais de voo em tempo real, medição da trajectória do veículo lançador; recepção, gravação, transmissão e processamento dos dados e telemetria do foguetão lançador e do satélite; tomar decisões relativas à segurança; e computar o estado de separação entre o satélite e o lançador e respectivos parâmetros de injecção.
Após o lançamento o foguetão é imediatamente seguido pelo equipamento óptico, de telemetria e por radares em torno do local de lançamento. Os dados recebidos são enviado para CCCM. Estes dados serão inicialmente processados e enviados para as estações respectivas. Os computadores das estações recebem estes dados e levam a cabo a conversão de coordenadas, utilizando esses dados como dados para orientar o sistema do CCTD para obter e seguir o alvo.
Após a detecção do alvo, os dados medidos são enviados para os computadores na estação e para o CCCM para serem processados. Estes dados processados são utilizados para o controlo da segurança do voo. Os resultados das computações são enviados para o Centro de Lançamento de Satélites de Xichang e para o Centro de Controlo de Satélites de Xi’an em tempo real através de linhas de transmissão de dados. Em caso de falha durante as fases de voo do primeiro ou segundo estágio, o oficial de segurança tomará uma decisão tendo por base os critérios de segurança.
A injecção orbital da carga é detectada pelos navios de rastreio e enviada para o Centro de Controlo de Satélites de Xi’an. Os resultados são enviados para o CCCM de Xichang para processamento e monitorização.
Dados Estatísticos e próximos lançamentos
– Lançamento orbital: 5534
– Lançamento orbital com sucesso: 5182
– Lançamento orbital China: 238
– Lançamento orbital China com sucesso: 226
– Lançamento orbital desde Xichang: 96
– Lançamento orbital desde Xichang com sucesso: 94
Ao se referir a ‘lançamentos com sucesso’ significa um lançamento no qual algo atingiu a órbita terrestre, o que por si só pode não implicar o sucesso do lançamento ou da missão em causa (como foi o caso do lançamento do Progress M-27M).
A seguinte tabela mostra os totais de lançamentos executados este ano em relação aos previstos para cada polígono à data deste lançamento.
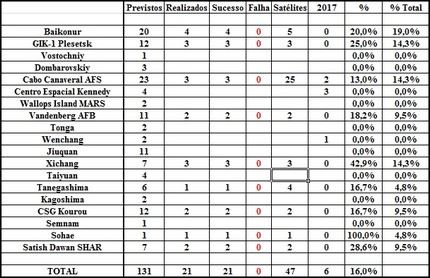
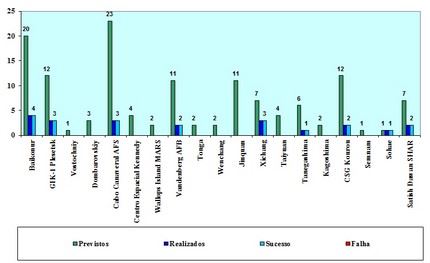
Dos lançamentos bem sucedidos levados a cabo: 33,3% foram realizados pela Rússia; 23,8% pelos Estados Unidos (incluindo ULA (60,0%), SpaceX (40,0%) e Orbital SC); 14,3% pela China; 9,5% pela Arianespace; 9,5% pela Índia, 4,8% pelo Japão, 0% pelo Irão e 4,8% pela Coreia do Norte.
Os próximos lançamentos orbitais previstos são (hora UTC):
31 Mar (16:20:00) – 14A14-1A Soyuz-2-1A – Baikonur, LC31 PU-6 – Progress MS-2
08 Abr (20:43:00) – Falcon-9 – Cabo Canaveral AFS, SLC-40 – Dragon SpX-8 (CRS8); BEAM
22 Abr (21:02:23) – Soyuz-STB/Fregat-MT (VS14) – CSG Kourou (Sinnamary), ELS – Sentinel-1B; MICROSCOPE; Norsat-1; AAUSAT-4; e-st@r-2; OUFTI-1
26 Abr (??:??:??) – 372RN16 Soyuz-2-1A/Volga (R15000-001/???) – Vostochniy, LC-1S; Mikhailo Lomonosov (Ломоносов); Aist-2D (Аист-2Д); Kontact-Nanosputnik (Контакт-наноспутник)
28 Abr (??:??:??) – PSLV-C33 (PSLV-XL) – Satish Dawan SHAR, FLP – IRNSS-1G